一 概念
PWM(脉冲宽度调制)是一种常用的电子信号调制技术,用于控制电子设备中的电平和电流。它通过调整脉冲的宽度来控制信号的平均功率。
在PWM信号中,一个周期由一个固定的频率确定,称为PWM频率。每个周期内,脉冲的高电平时间称为占空比,表示高电平时间与周期时间的比例。占空比决定了输出信号的平均功率。
PWM常用于控制电机的转速、调节LED的亮度、产生音频信号等应用中。通过调整PWM的占空比,可以实现精确的控制和调节效果。
在微控制器中,常见的做法是使用定时器来生成PWM信号。通过调整定时器的周期和占空比,可以实现不同的PWM输出。
二 时钟
在stm32中,我们初始化配置的时钟一般是有默认配置的,如果你的板卡参数与默认参数不一致
则有可能造成pwm波稳定性的差异问题
当pll配置错误时,通过cubemx可以看出,时钟是有很大的偏差
计算公式
PLL_VCO = (HSE_VALUE or HSI_VALUE / PLL_M) * PLL_N

三 周期频率
在PWM中,以下是周期、频率、时钟频率和预分频值之间的关系:
1. 周期(Period):周期是PWM信号一个完整周期的时间长度,通常用时间单位表示,如秒或微秒。周期决定了PWM信号的重复时间。
2. 频率(Frequency):频率是PWM信号的周期数与时间的倒数,通常以赫兹(Hz)表示。频率表示了PWM信号的重复次数或周期数。
频率 = 1 / 周期
3. 时钟频率(Clock Frequency):时钟频率是用于驱动PWM生成的定时器的时钟速度。它决定了定时器每个时钟周期的长度。时钟频率通常以赫兹(Hz)表示。
4. 预分频值(Prescaler Value):预分频值是定时器的分频因子,用于将时钟频率分频为更低的频率。预分频值决定了定时器每个时钟周期的长度。
实际时钟频率 = 时钟频率 / 预分频值
注意:有些微控制器的定时器可能直接提供了分频功能,而不需要额外的预分频设置。
关系示例:
假设我们希望生成一个周期为10毫秒(ms)的PWM信号,并且使用时钟频率为84MHz。我们可以按照以下步骤确定预分频值:
1. 确定目标频率:
目标频率 = 1 / 周期 = 1 / 0.01s = 100 Hz
2. 确定定时器的时钟频率:
时钟频率 = 84 MHz
3. 计算预分频值:
预分频值 = 时钟频率 / 目标频率 = 84,000,000 Hz / 100 Hz = 840,000
这意味着我们需要将时钟频率分频为840,000 Hz。
请注意,具体的计算方法可能因微控制器型号和定时器配置而有所不同。以上示例仅提供了一种基本的计算思路,具体的实现可能需要根据实际情况进行调整。
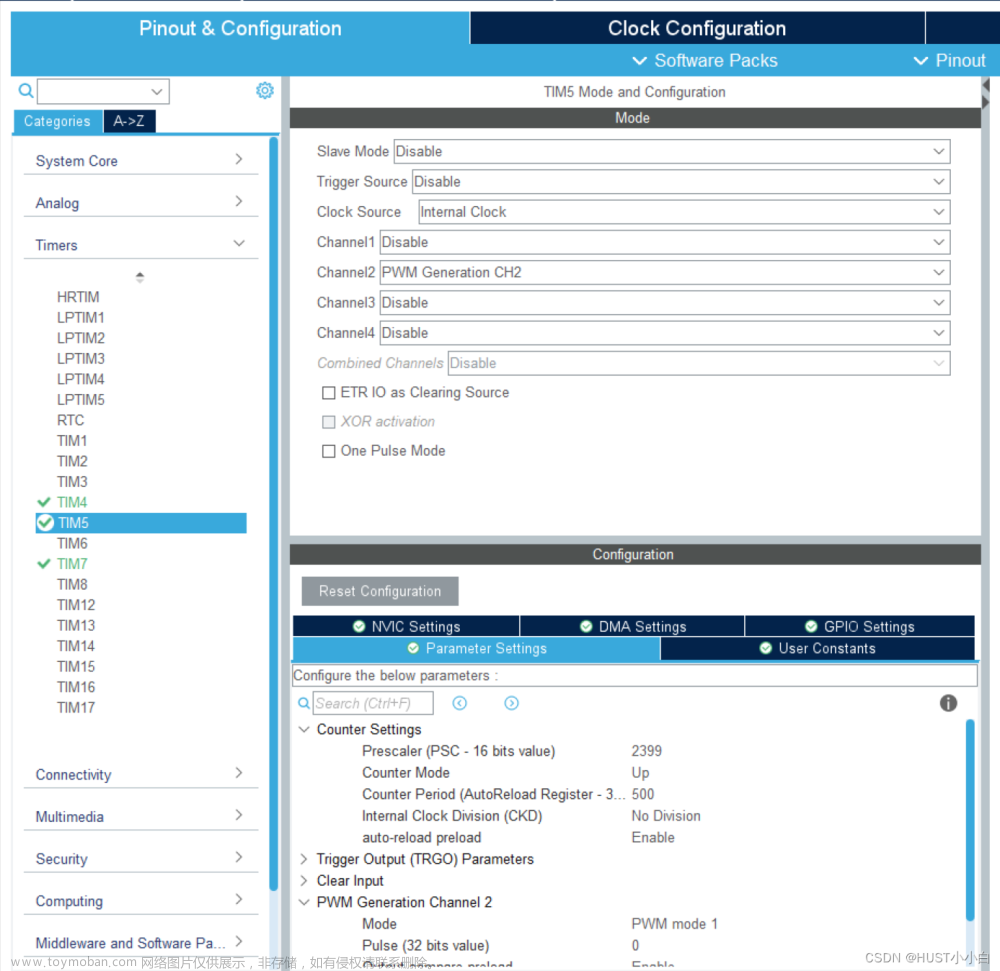
四 例程
当需要配置 STM32标准库(Standard Peripheral Library)生成 PWM 信号时,可以按照以下步骤进行配置。请注意,下面的代码是基于 STM32F4 系列单片机的标准库代码示例。
- 配置定时器的时钟:
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);这将使能 TIM3 定时器的时钟。
- 配置 GPIO 引脚作为 PWM 输出:
GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; // 假设使用 GPIOA 的 Pin 6 作为 PWM 输出 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_PinAFConfig(GPIOA, GPIO_PinSource6, GPIO_AF_TIM3); // 将 GPIO 引脚映射到 TIM3这将配置 GPIOA Pin 6 为复用功能,并将其映射到 TIM3。
- 配置定时器为 PWM 模式:
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_TimeBaseStructure.TIM_Prescaler = 0; // 不使用预分频 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseStructure.TIM_Period = 59999; // 设置周期,根据目标频率计算得出 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseStructure.TIM_RepetitionCounter = 0; TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);这将配置 TIM3 定时器的基本参数,包括不使用预分频、设置周期(根据目标频率计算得出)等。
- 配置定时器的通道为 PWM 模式并设置占空比:
TIM_OCInitTypeDef TIM_OCInitStructure; TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; TIM_OCInitStructure.TIM_Pulse = 30000; // 设置占空比,根据需要调整 TIM_OC1Init(TIM3, &TIM_OCInitStructure); TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable); // 使能预加载寄存器这将配置 TIM3 的通道 1 为 PWM 模式,并设置输出极性和占空比(根据需要进行调整)。
- 启动定时器:
TIM_Cmd(TIM3, ENABLE);文章来源:https://www.toymoban.com/news/detail-492170.html这将启动 TIM3 定时器,开始生成 PWM 信号。文章来源地址https://www.toymoban.com/news/detail-492170.html
五 整体代码
#include "stm32f4xx.h"
void TIM3_PWM_Configuration(void)
{
// Step 1: Enable the TIM3 clock
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
// Step 2: Configure GPIO pins as PWM output
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; // Assuming using GPIOA Pin 6 as PWM output
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource6, GPIO_AF_TIM3); // Map GPIO pin to TIM3
// Step 3: Configure TIM3 in PWM mode
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Prescaler = 0; // No prescaler
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_Period = 59999; // Set period, calculate based on desired frequency
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
// Step 4: Configure TIM3 channel as PWM output and set duty cycle
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_Pulse = 30000; // Set duty cycle, adjust as needed
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable); // Enable preload register
// Step 5: Enable TIM3
TIM_Cmd(TIM3, ENABLE);
}
int main(void)
{
// Initialize the system
// Configure TIM3 for PWM
TIM3_PWM_Configuration();
while (1)
{
// Your application code here
}
}
到了这里,关于STM32pwm 时钟 配置 周期 频率 关系配置原理的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!