某日需要在matlab进行图像的的极直互化,发现并没有介绍相应内容的文章,所以有了自己调研一下并写一写的想法。果然只要想就能做到,所以有了下面这篇文章。
根据直角坐标系(笛卡尔系)内数值和极坐标系关系

根据上述公式不难想出,在直角坐标系中的圆会在极坐标中转化为一条直线(画图太麻烦了,脑补吧)。

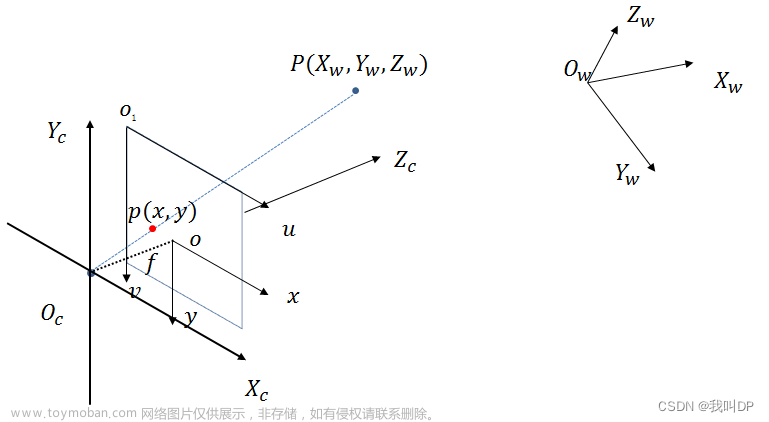
还是画一下吧便于理解,就图上这样XY代表的大坐标系,即最后生成图像的坐标系,里面小的坐标系呢,上面图表示的是直角系,下面图表示的是极坐标系,即求二者之间的互相转化。
直角系到极坐标系的转化步骤是,算出极坐标系点位在直角系中点位的映射(由于我都极坐标系尺寸更大,所以还需要进行插值,这里用到的双线性插值)(这里映射是指的外部的大坐标系)
双线性插值的知识很多,很容易找到大家去找吧。
clear;
clc;
%自己命名的读取函数
% I=readOriginalImage('D:\MatlabWorkPlace\MatlabCode\PolarAndCartesian\512circle.txt',512,512);
I=readSingleRecon('E:\DeadMouse\5\OriginalImage\0015.txt',353,353);
imtool(I,[]);
[M,N]=size(I);
R=M/2;
X=353;
Y=353*2;
delta_r=R/X;
delta_theta=2*pi/Y;
Image=zeros(Y,X);
theta_1=zeros(1,Y);
for i=1:Y
theta=i*delta_theta;
theta_1(1,i)=theta;
sin_theta=sin(theta);
cos_theta=cos(theta);
for j=1:X
temp_r=j*delta_r;
x= R+temp_r*cos_theta;
xf=floor(x);
xc=ceil(x);
if xf<1
xf=1;
end
if xc<1
xc=1;
end
if xc>M
xc=M;
end
y= R+temp_r*sin_theta;
yf=floor(y);
yc=ceil(y);
if yf<1
yf=1;
end
if yc<1
yc=1;
end
if yc>N
yc=N;
end
Aaa=interp_bilinear(I,xf,xc,x,yf,yc,y);
Image(i,j)=interp_bilinear(I,xf,xc,x,yf,yc,y);
end
end
imtool(Image,[]);
% I=xRemoveStripesVertical(Image,6,'db25',7);
I=Image;
imtool(I,[]);
%自己命名的保存函数
saveFile('D:\MatlabWorkPlace\MatlabCode\PolarAndCartesian.txt',I);
%双线性插值代码
function value=interp_bilinear(I,x1,x2,x,y1,y2,y)
if x2==x1&&y2==y1
value=I(x1,y1);
elseif x2==x1
value=I(x1,y1)*(y2-y)/(y2-y1)+I(x1,y2)*(y-y1)/(y2-y1);
elseif y1==y2
value=I(x1,y1)*(x2-x)/(x2-x1)+I(x2,y1)*(x-x1)/(x2-x1);
else
h=(x2-x1)*(y2-y1);
value=I(x1,y1)*(x2-x)*(y2-y)/h+I(x2,y1)*(x-x1)*(y2-y)/h+I(x1,y2)*(x2-x)*(y-y1)/h+I(x2,y2)*(x-x1)*(y-y1)/h;
end
end
极坐标系到直角系同样的,算出直角系中的点位在极坐标系中的映射(映射指的是外部的大坐标系)
clear;
%自己命名的读取
I=readSingleRecon('D:\MatlabWorkPlace\MatlabCode\PolarAndCartesian.txt',353*2,353);
imtool(I,[]);
[Y,X]=size(I);
R=353/2;
M=2*R;
N=2*R;
delta_r=R/X;
delta_theta=2*pi/Y;
Image=zeros(M,N);
theta_1=zeros(M,N);
for i=1:M
for j=1:N
xx=i-R;
yy=j-R;
temp_r=sqrt((xx)^2+(yy)^2);
r=temp_r/delta_r;
r=round(r);
if xx==0
xx=0.0001;
end
if xx>0 && yy>0
theta=atan(yy/xx);
elseif xx<0 &&yy>0
theta =atan(yy/xx)+pi;
elseif xx<0 &&yy<0
theta=atan(yy/xx)+pi;
elseif xx>0 &&yy<0
theta=atan(yy/xx)+2*pi;
end
theta=theta/delta_theta;
theta=round(theta);
if theta==0
theta=1;
end
if theta>Y
theta=Y;
end
if r>X
r=X;
end
Image(i,j)=I(theta,r);
end
end
imtool(Image,[]);
无论是直角系转化为极坐标系,还是极坐标系转化为直角系,最重要的就是映射关系的对应
结果贴上

原图

转化成极坐标系

极坐标系转化为直角系
结论如下文章来源:https://www.toymoban.com/news/detail-510549.html
可以看到经过转化,内切圆内区域并没有发生什么变化,内切圆外区域又没什么用(差别是因为两次转化造成的),证明这个计算过程是可行的。代码水平一般将就看吧。文章来源地址https://www.toymoban.com/news/detail-510549.html
到了这里,关于Matlab 实现图像的直角坐标系和极坐标系的相互转化的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!