rosbag基本应用
rosbag录制数据
录制所有话题:
rosbag record -a
录制指定话题,设置 bag 包名:
rosbag record -O xxx.bag /topic
rosbag回放数据
以暂停的方式启动,防止跑掉数据
rosbag play --pause xxx.bag
设置以 0.5 倍速回放,也就是以录制频率的一半回放
rosbag play -r 0.5 xxx.bag
rosbag获取bag文件的信息
rosbag info xxx.bag
rosbag压缩
如果录制的 bag 很大,我们可以压缩它,默认的压缩格式是 bz2:
rosbag compress xxx.bag
你也可以添加 -j 手动指定压缩格式为 bz2:
rosbag compress -j xxx.bag
也可以使用 LZ4 来压缩数据:
rosbag compress --lz4 xxx.bag
rosbag解压
rosbag decompress xxx.bag解压
rosbag截取时间段
rosbag filter input.bag output.bag "t.to_sec() <= 1284703001.00 and t.to_sec() >= 1284703000.00"
rqt_bag显示与绘制
rqt_bag
rqt_bag是一个用于记录和管理包文件的应用程序。主要特点:
- 显示bag信息内容
- 显示图像消息(可选为时间线上的缩略图)
- 绘制消息值的可配置时间序列
- 向ROS发布/记录所选topic的消息
- 将时间范围内的消息导出到新bag
rosbag中读取图像数据
运行以下命令从input.bag的/img/cam的话题中读取图像数据
python2 export.py
export.py文件如下所示
# coding:utf-8
#!/usr/bin/python
#Exrtact image from a bag file.
import roslib
import rosbag
import rospy
import cv2
import os
from cv_bridge import CvBridge
from cv_bridge import CvBridgeError
image_path = './image/'
class ImageCreator():
def __init__(self):
self.bridge = CvBridge()
with rosbag.Bag('./input.bag', 'r') as bag:
for topic,msg,t in bag.read_messages():
if topic == "/img/cam": #topic for images;
try:
cv_image = self.bridge.imgmsg_to_cv2(msg,"bgr8")
except CvBridgeError as e:
print e
timestr = "%.6f" % msg.header.stamp.to_sec() #%.6fis the precision of the timestamps you prefer;
image_name = timestr+ ".png" #name: timestamps.png
cv2.imwrite(image_path + image_name, cv_image) #save;
if __name__ == '__main__':
try:
image_creator = ImageCreator()
except rospy.ROSInterruptException:
pass
rosbag中读取点云数据
确保linux系统中安装了pcl_ros包:
rospack find pcl_ros
若没有安装则需要运行以下命令:
sudo apt-get install ros-melodic-pcl-ros
启动ros的master节点
roscore
运行以下命令,读取点云数据
rosrun pcl_ros bag_to_pcd bag包 点云话题 保存pcd的路径
# eg: rosrun pcl_ros bag_to_pcd data.bag /velodyne_points pcd
点云可视化
pcl_viewer xxx.pcd
结果如下图所示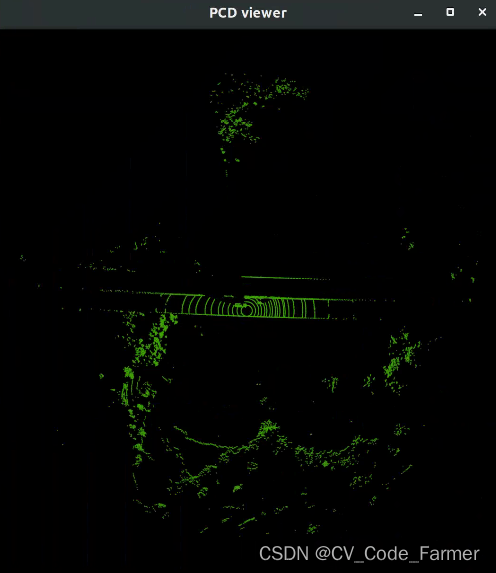 文章来源:https://www.toymoban.com/news/detail-536956.html
文章来源:https://www.toymoban.com/news/detail-536956.html
使用Matlab读取bag信息
以下是一个matlab读取bag信息并绘图的示例(具体使用需要根据自身bag的Topic相关信息进行修改),其中/mavros/local_position/pose 为无人机状态,包含了无人机位置、速度、姿态等信息/prometheus/control/ref_pose_rviz为无人机期望轨迹,包含了期望位置和期望姿态(期望姿态由控制器计算得到)文章来源地址https://www.toymoban.com/news/detail-536956.html
filepath=fullfile('d:','Matlab/bag','subset2.bag');
bag=rosbag(filepath);
prometheus_msgs_ref_pose = select(bag,'Topic','/prometheus/control/ref_pose_rviz');
prometheus_msgs_pose = select(bag,'Topic','/mavros/local_position/pose');
drone_ref_pose = readMessages(prometheus_msgs_ref_pose,'DataFormat','struct');
drone_pose = readMessages(prometheus_msgs_pose,'DataFormat','struct');
%% 位置
drone_ref_position=zeros(length(drone_ref_pose),3);
t_ref_position = zeros(length(drone_ref_pose),1);
for i = 1:length(drone_ref_pose)
drone_ref_position(i,1) = drone_ref_pose{i,1}.Pose.Position.X;
drone_ref_position(i,2) = drone_ref_pose{i,1}.Pose.Position.Y;
drone_ref_position(i,3) = drone_ref_pose{i,1}.Pose.Position.Z;
t_ref_position(i) = drone_ref_pose{i,1}.Header.Stamp.Sec;
end
drone_position=zeros(length(drone_pose),3);
t_position = zeros(length(drone_pose),1);
for i = 1:length(drone_pose)
drone_position(i,1) = drone_pose{i,1}.Pose.Position.X;
drone_position(i,2) = drone_pose{i,1}.Pose.Position.Y;
drone_position(i,3) = drone_pose{i,1}.Pose.Position.Z;
t_position(i) = drone_pose{i,1}.Header.Stamp.Sec;
end
% x轴位置曲线
figure
plot(t_ref_position(:),drone_ref_position(:,1))
hold on
plot(t_position(:),drone_position(:,1));
hold off
xlabel('时间戳/s');
ylabel('距离/m');
% y轴位置曲线
figure
plot(t_ref_position(:),drone_ref_position(:,2))
hold on
plot(t_position(:),drone_position(:,2));
hold off
xlabel('时间戳/s');
ylabel('距离/m');
% z轴位置曲线
figure
plot(t_ref_position(:),drone_ref_position(:,3))
hold on
plot(t_position(:),drone_position(:,3));
hold off
xlabel('时间戳/s');
ylabel('距离/m');
%% 姿态角
drone_ref_orientation=zeros(length(drone_ref_pose),4);
drone_ref_angle=zeros(length(drone_ref_pose),3);
t_ref_position = zeros(length(drone_ref_pose),1);
for i = 1:length(drone_ref_pose)
drone_ref_orientation(i,1) = drone_ref_pose{i,1}.Pose.Orientation.X;
drone_ref_orientation(i,2) = drone_ref_pose{i,1}.Pose.Orientation.Y;
drone_ref_orientation(i,3) = drone_ref_pose{i,1}.Pose.Orientation.Z;
drone_ref_orientation(i,4) = drone_ref_pose{i,1}.Pose.Orientation.W;
[drone_ref_angle(i,1),drone_ref_angle(i,2),drone_ref_angle(i,3)]=quat2angle(drone_ref_orientation(i,:),'XYZ');
t_ref_position(i) = drone_ref_pose{i,1}.Header.Stamp.Sec;
end
drone_orientation=zeros(length(drone_pose),4);
drone_angle=zeros(length(drone_pose),3);
t_position = zeros(length(drone_pose),1);
for i = 1:length(drone_pose)
drone_orientation(i,1) = drone_pose{i,1}.Pose.Orientation.X;
drone_orientation(i,2) = drone_pose{i,1}.Pose.Orientation.Y;
drone_orientation(i,3) = drone_pose{i,1}.Pose.Orientation.Z;
drone_orientation(i,4) = drone_pose{i,1}.Pose.Orientation.W;
[drone_angle(i,1),drone_angle(i,2),drone_angle(i,3)]=quat2angle(drone_orientation(i,:),'XYZ');
t_position(i) = drone_pose{i,1}.Header.Stamp.Sec;
end
drone_ref_angle(:,3)=-abs(drone_ref_angle(:,3));
drone_angle(:,3)=-abs(drone_angle(:,3));
subplot(3, 1, 1);
plot(t_ref_position(:),drone_ref_angle(:,1))
hold on
plot(t_position(:),drone_angle(:,1));
hold off
xlabel('时间戳/s');
ylabel('弧度/rad');
subplot(3, 1, 2);
plot(t_ref_position(:),drone_ref_angle(:,2))
hold on
plot(t_position(:),drone_angle(:,2));
hold off
xlabel('时间戳/s');
ylabel('弧度/rad');
subplot(3, 1, 3);
plot(t_ref_position(:),drone_ref_angle(:,3))
hold on
plot(t_position(:),drone_angle(:,3));
hold off
xlabel('时间戳/s');
ylabel('弧度/rad');
到了这里,关于ROS学习笔记(五):rosbag与读取图片与点云数据的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!