1.步进电机工作原理
步进电机通过不停的变换通电线圈和线圈的通电方向进行旋转,每次变换使步进电机转子转动1.8°。如图所示,这里采用的是两相四线步进电机,所有的转动都由以下四个步骤构成




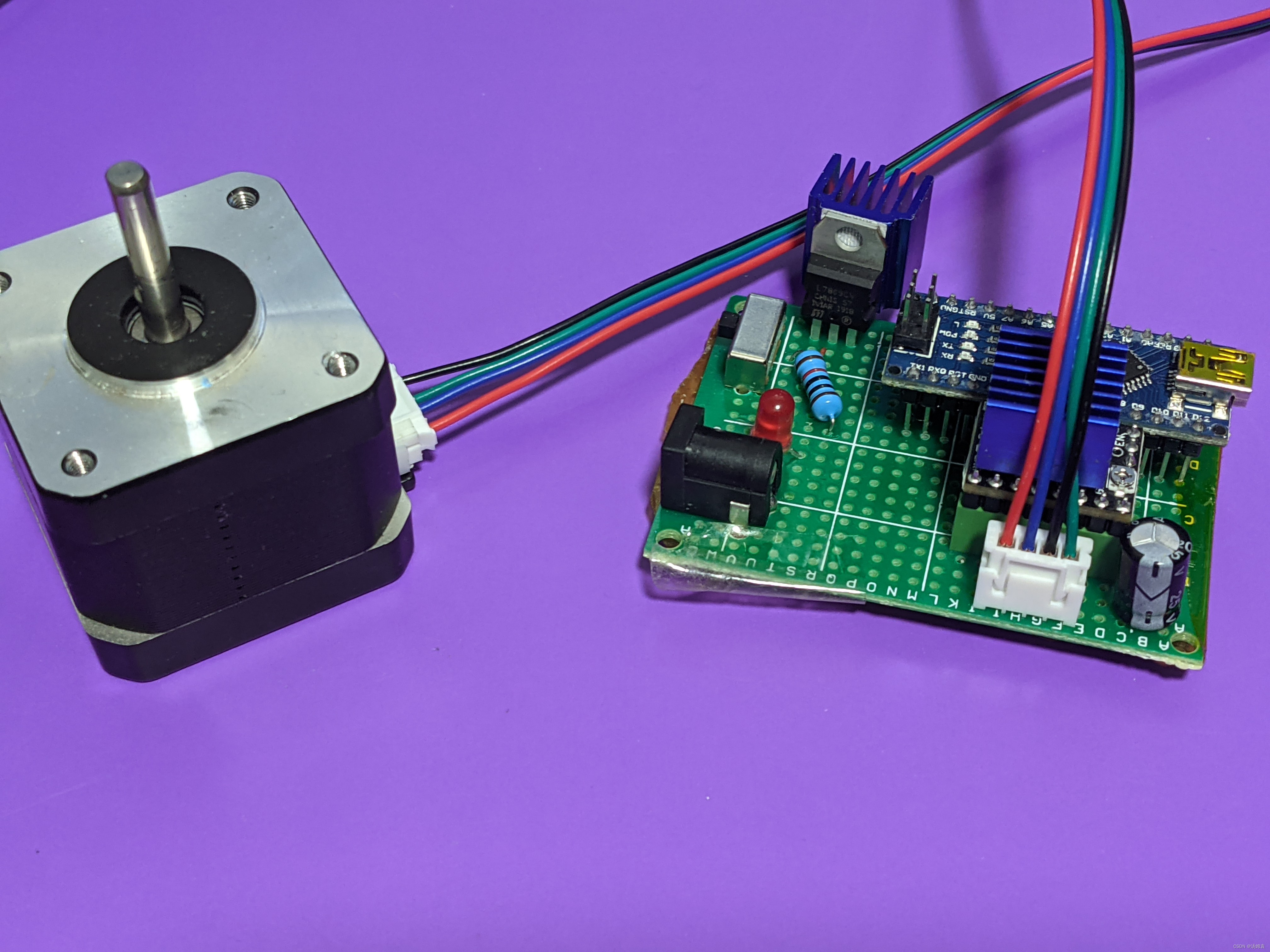
2.arduino+驱动器+步进电机,接线示意图
 文章来源:https://www.toymoban.com/news/detail-540624.html
文章来源:https://www.toymoban.com/news/detail-540624.html
3.编写arduino程序文章来源地址https://www.toymoban.com/news/detail-540624.html
int ENA=8; //这里填写使能信号需要的io口
int PUL=9; //这里填写脉冲信号需要的io口
int DIR=10;//这里填写方向信号需要的io口
int x;
void setup()
{
pinMode(PUL, OUTPUT);//设置io口输出
pinMode(DIR, OUTPUT);//设置io口输出
pinMode(ENA, OUTPUT);//设置io口输出
digitalWrite(ENA,LOW);//LOW表示使能开启,HIGH表示使能关闭
}
void loop()
{
digitalWrite(DIR,HIGH);//正转
//digitalWrite(DIR,LOW);//反转
maichong(2000,5);
}
//设置一个脉冲函数
void maichong(int times,int speed)//times是脉冲的数量,speed是脉冲间隔,对应着电机的速度
{
for(x=0; x<times; x++)
{
digitalWrite(PUL,HIGH);
delayMicroseconds(200);//这个函数单位为微秒
digitalWrite(PUL,LOW);
delayMicroseconds(200);//驱动器说明书规定了脉冲信号的持续时间,在规定的时间内选择尽量小的数值
delay(speed);//前后两个脉冲之间的间隔
}
}
到了这里,关于arduino uno+驱动器控制42步进电机的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!