前言
esp32-s3板子可用于micropython编程,需要刷入语言固件库
硬件:esp32-s3板子(需要购买)
固件:GENERIC_S3-20220618-v1.19.1.bin文件
软件:flash_download_tool
一、下载固件
下载地址:https://micropython.org/download/GENERIC_S3/
选用最新的(.bin)文件下载,如下: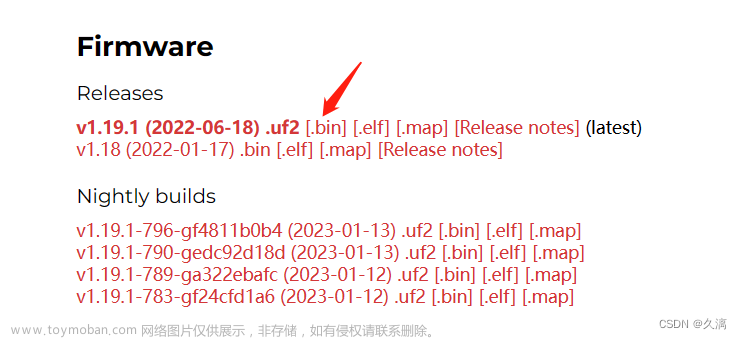
二、下载软件
下载地址:https://www.espressif.com.cn/zh-hans/support/download/other-tools?keys=&field_type_tid%5B%5D=842
如下图所示:
三、刷固件
解压后,点击运行,如下:


按上图所示设置,连接上电脑和板子,按boot键(key键)时,点击1、EARSE,松开boot键,擦除内存;然后等待下载(即擦除)完成,点击2、STOP,然后按住boot键时,点击3、START,松开boot键,下载固件,等待下载完成。文章来源:https://www.toymoban.com/news/detail-561119.html
总结
万事开头难,路遥知马力。文章来源地址https://www.toymoban.com/news/detail-561119.html
到了这里,关于esp32-s3板子刷固件的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!











