2018年电赛A题 软件部分 STM32 FFT 时域到频域 STM32cubeMX HAL
A题:电流信号检测装置
软件部分(STM32cubeMX+HAL)
题目要求:任意波信号发生器输出非正弦信号时,基波频率范围为50Hz~200Hz,测量电流信号基波频率,频率测量精度优于1%;测量基波及各次谐波分量的幅度(振幅值),电流谐波测量频率不超过1kHz,测量精度优于5% 。
实现方式:利用STM32单片机内置ADC对待测信号进行采集,ADC采用DMA传输,用定时器控制ADC采样频率,然后用ST官方提供的DSP库进行运算,运算完之后对频谱进行分析。
理论基础
对于初学者来说,不了解FFT算法是很正常的,但是ST官方提供了DSP库,我们直接拿过来用就可以了,不用去学算法的具体内容。
为了便于对运算后的频谱进行分析,我们需要明确一下几个概念:
f
a
d
c
:
A
D
C
的采样频率
N
:采样点数
f
k
:频率分辨率
f_{adc}:ADC的采样频率\\N:采样点数\\f_k:频率分辨率
fadc:ADC的采样频率N:采样点数fk:频率分辨率
f
k
=
f
a
d
c
N
f_k=\frac{f_{adc}}{N}
fk=Nfadc
eg:ADC的采样频率通过定时器控制为10240Hz
采样点数为1024(只能为4的整数次方,博主一般用1024或4096)
那么可得频率分辨率为
f
k
=
10240
1024
=
10
f_k=\frac{10240}{1024}=10
fk=102410240=10
即FFT运算后的频谱每个横坐标为10Hz,就可以理解为第0个数是频率为0的幅值,第1个数为频率为10的幅值,第2个数为频率为20的幅值。
单片机外设的配置
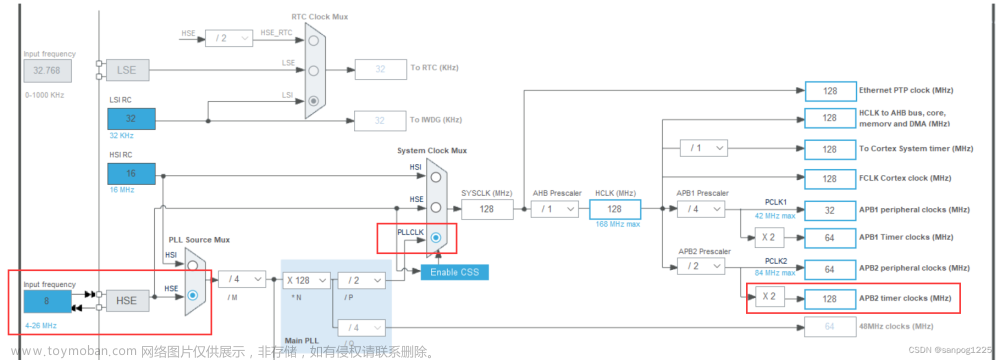
1.配置时钟,外部高速时钟选择晶振,APB2定时器时钟配置为128MHz,注意,后面有用到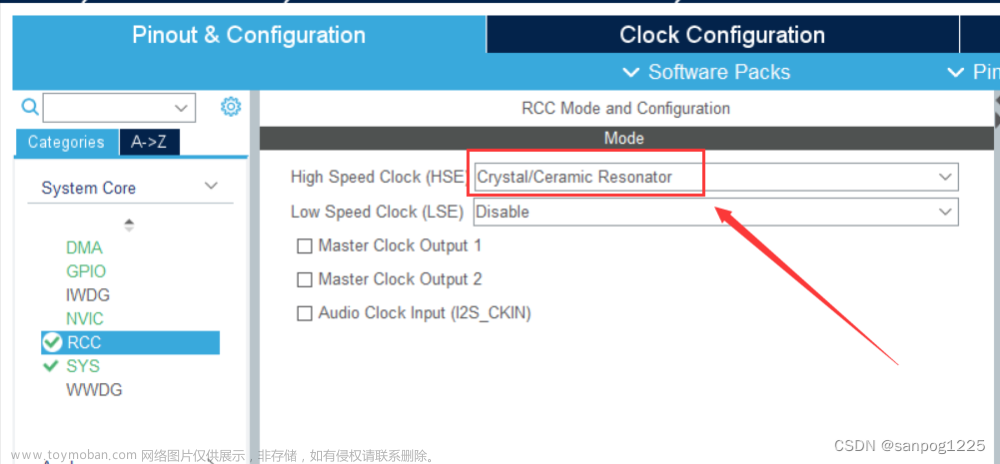
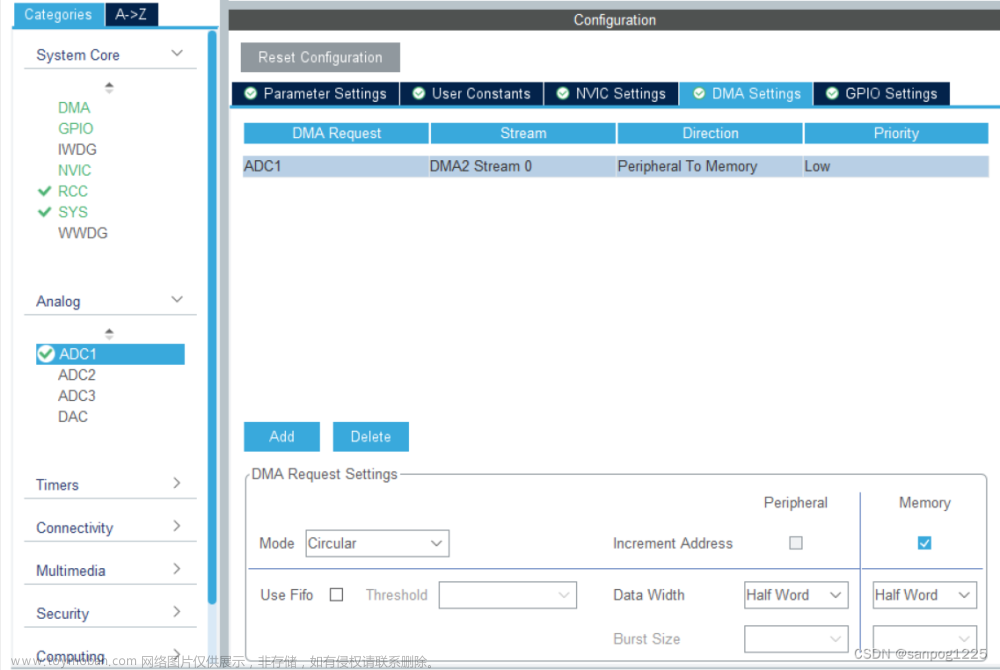
2.配置ADC和DMA,如下图所示: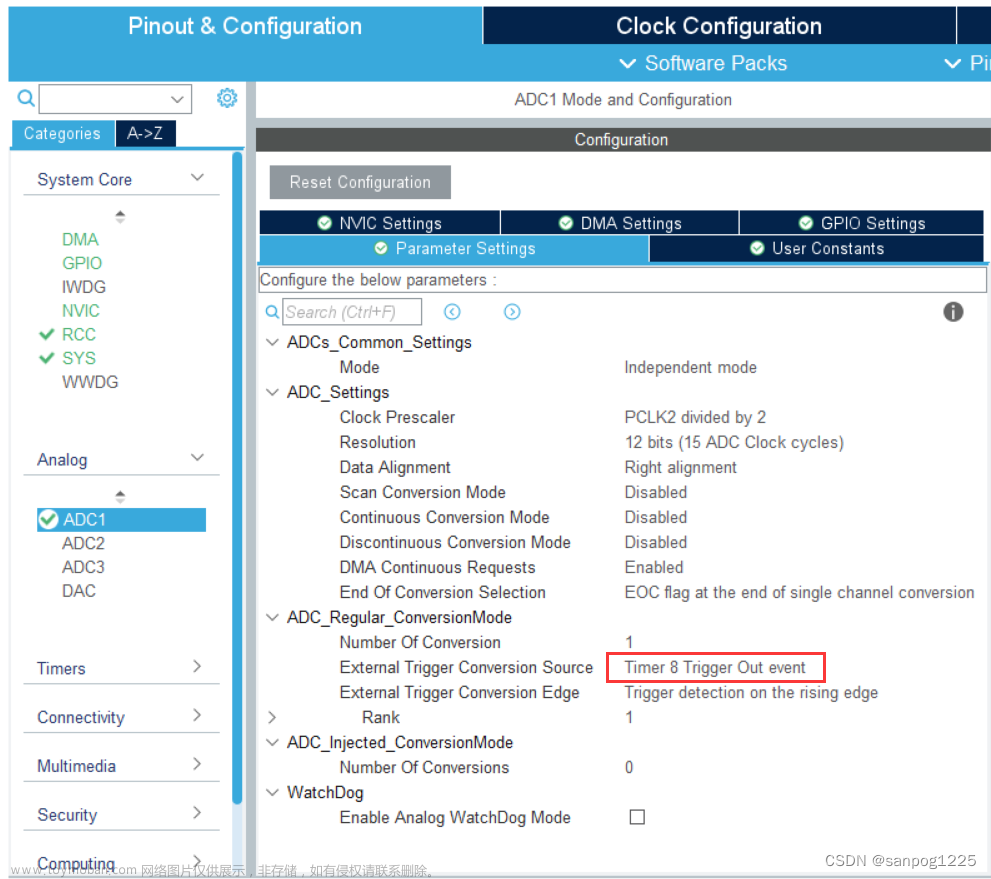
3.定时器配置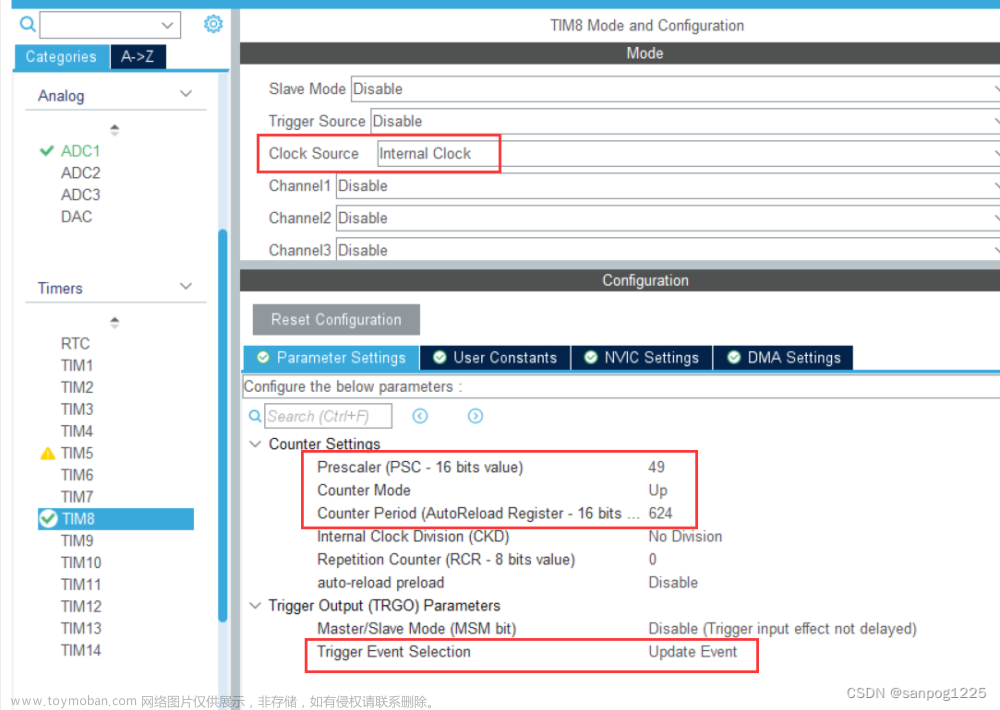
由此可得到ADC的采样频率
f
a
d
c
=
128
M
h
z
(
49
+
1
)
(
624
+
1
)
=
4096
H
z
f_{adc}=\frac{128Mhz}{(49+1)(624+1)} =4096Hz
fadc=(49+1)(624+1)128Mhz=4096Hz
那么到这里外设配置就结束了,可以根据自己的需求自行配置UART,这里就不作展示了。
DSP库的移植
用STM32进行FFT运算主要会用到以下文件,博主已经为大家整理好了,大家可以直接去下载我的例程:链接: https://download.csdn.net/download/qq_53214662/87728832

将以上头文件(.h)和库文件(.lib)添加进工程就可以使用了
这里放上我的源码
main.c。文章来源:https://www.toymoban.com/news/detail-605918.html
#include "main.h"
#include "adc.h"
#include "dma.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
#include "stdio.h"
#include "arm_math.h"
#define FFT_LENGTH 4096
void SystemClock_Config(void);
int fputc(int ch,FILE*f)
{
HAL_UART_Transmit(&huart1,(uint8_t*)&ch,1,10);
return ch;
}
float fft_inputbuf[FFT_LENGTH*2];
float fft_outputbuf[FFT_LENGTH];
uint16_t AD_value[FFT_LENGTH]={0};
float Harmonic_Amplitude[19]={0,0};
uint16_t Harmonic_Frequency[19]={0,0};
uint16_t i=0,n=0,j=0,k=0;
float Fundamental_wave=0;
uint16_t Fundamental_wave_f=0;
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_DMA_Init();
MX_ADC1_Init();
MX_TIM8_Init();
MX_USART1_UART_Init();
HAL_TIM_Base_Start(&htim8);
HAL_ADC_Start_DMA(&hadc1,(uint32_t *)AD_value,FFT_LENGTH);
HAL_Delay(2000);
for(i=0;i<FFT_LENGTH;i++)
{
fft_inputbuf[2*i]=AD_value[i];
fft_inputbuf[2*i+1]=0; //虚部全部为0
}
arm_cfft_radix4_instance_f32 scfft; //声明结构体变量
arm_cfft_radix4_init_f32(&scfft,FFT_LENGTH,0,1);//初始化
arm_cfft_radix4_f32(&scfft,fft_inputbuf);//傅里叶计算
HAL_Delay(1000);
arm_cmplx_mag_f32(fft_inputbuf,fft_outputbuf,FFT_LENGTH); //取模得幅值
HAL_Delay(1000);
for(i=45;i<205;i++)
{
if(fft_outputbuf[i]>Fundamental_wave)
{
Fundamental_wave=fft_outputbuf[i];
Fundamental_wave_f=i;
}
}
for(n=2;n<=20;n++)
{
if(n*Fundamental_wave_f>1000)break;
for(k=n*Fundamental_wave_f-5;k<n*Fundamental_wave_f+5;k++)
{
if(fft_outputbuf[k]>Harmonic_Amplitude[n-2])
{
Harmonic_Amplitude[n-2]=fft_outputbuf[k];
Harmonic_Frequency[n-2]=k;
}
}
}
while (1)
{
//幅值
printf("page0.x0.val=%d\xff\xff\xff",(int)(Fundamental_wave/2048*3300/4095*10));
//频率
printf("page0.x10.val=%d\xff\xff\xff",(int)(Fundamental_wave_f*10));
}
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 128;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
根据输出数组fft_outputbuf里面的值就可得到我们想要的基波及其谐波的赋值和频率了,如果在使用过程中有什么问题欢迎私信博主。文章来源地址https://www.toymoban.com/news/detail-605918.html
到了这里,关于2018年电赛A题 软件部分 STM32 FFT 时域到频域 STM32cubeMX HAL的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!