环境搭建
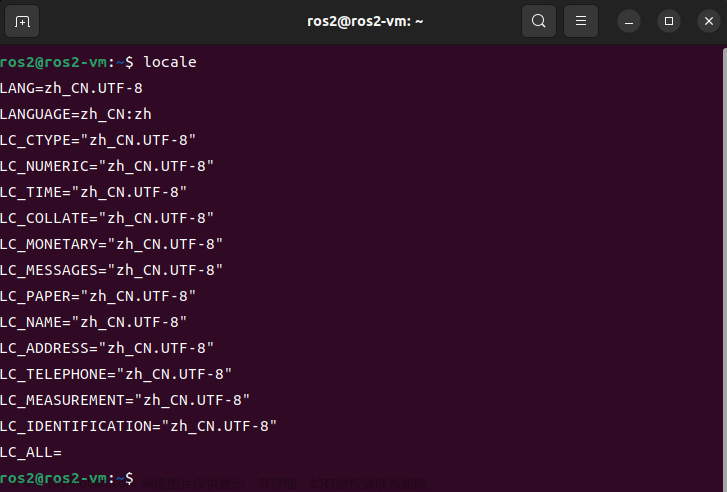
设置系统区域。
首先需要确保安装环境支持 UTF-8 格式
sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale
添加 ROS2 的代码仓库
设置你的sources.list,让您的计算机以接受来自 packages.ros.org 的软件
sudo sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list'
设置您的密钥
sudo apt install curl # 如果你还没有安装 curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
如果密钥设置失败,提示gdp:找不到有效的OpenPGP数据,那就从另一个网址获取密钥,直接执行下面的指令就可以了
wget http://packages.ros.org/ros.key
sudo apt-key add ros.key
sudo apt-get update --fix-missing
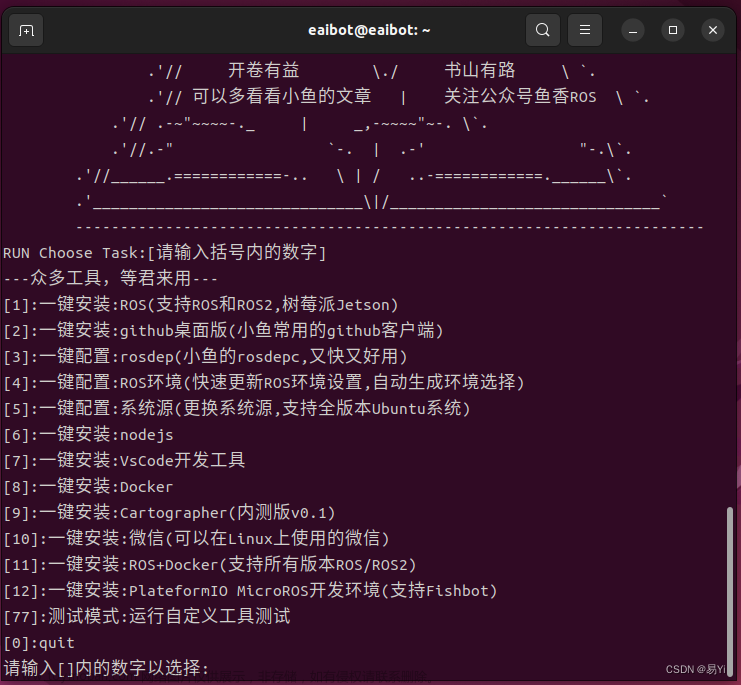
安装ros2
更新列表:
sudo apt update
安装 ROS2 桌面版,包括 ROS, RViz, demos, tutorials。
sudo apt install ros-eloquent-desktop
安装自动补全工具
pip3 install -U argcomplete
安装编译工具
sudo apt install python3-colcon-common-extensions
安装依赖和 ROS 工具
sudo apt update && sudo apt install -y build-essential cmake git
python3-colcon-common-extensions python3-pip python-rosdep python3-vcstool wget
# 安装 FAST-RTPS 依赖项
sudo apt install --no-install-recommends -y libasio-dev libtinyxml2-dev
# 安装 Cyclone DDS 依赖项
sudo apt install --no-install-recommends -y libcunit1-dev
配置环境
添加环境变量文章来源:https://www.toymoban.com/news/detail-648134.html
echo "source /opt/ros/eloquent/setup.bash" >> ~/.bashrc
验证ros2
新开两个个终端,分别运行发布者和订阅者文章来源地址https://www.toymoban.com/news/detail-648134.html
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_py listener
到了这里,关于ubuntu环境上搭建ros2的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!