摘要
随着社会不断进步, 经济快速发展, 科学技术也在突飞猛进, 交通行业是典型的领域之一。现阶段的交通发展W 实现智能交通系统为目标, 正逐渐从信息化步入智能化,朝着智慧化迈进。近年来,一系列先进的理念和技术用来解决交通拥堵、道路安全、能源消耗和环境污染等问题, 自动驾驶汽车就是发展最迅速的代表。现阶段针对无人驾驶汽车的研巧多集中在车辆制造技术, 而对其在现实场景中的仿真研究, 尤其是对高速公路下匯道过程的研巧甚少。为此, 本文依托国家自然科学基金项目" 混入自动驾驶汽车的高速公路交通流微观建模与仿真方法研究", W 手动驾驶汽车下西道行为研巧和己有自动驾驶汽车实地试验研究为基础, 建立自动驾驶汽车下化道的交通流模型; 提出自动驾驶汽车下匯道路径优化控制策略, 运用计算机仿真手段, 确定其最优的下面道路径控制策略, 为面向自动驾驶汽车的高速公路管理与控制提供前瞻性研究基础。
第一章绪论
1 . 1 研究背景及意义
随着社会不断进步, 经济快速发展, 汽车的技术发展水平迅速提高, 而汽车的普及程度己逐渐成为衡量一个国家或地区现代化程度的重要指标。据统计, 2 0 1 4 年中国汽车产量和销量分别为2 3 7 2 万辆和2 3 4 9 万辆, 同比增长7 . 3 % 和6 . 9% , 连续六年排名全球第一。由此引发的一系列社会问题日益突出, 包括交通拥堵、道路安全、能源消耗、环境污染等, 送些严峻的现实问题均与现阶段汽车发展存在着必然的关系, 具体体现在常规汽车在应对交通拥堵时难1^ 保持统一的运行规则, 驾驶者与道路基础设施之间矛盾诱发的交通事故, W 及汽车欠合理操作引起的能源消耗及其带来的环境污染。同时, 这些问题都己威胁到公众生命、财产的安全, 因而解决此类问题的对策—智能交通系统( In t e l l i gen t Tra n s p o rt a t i o n S y s t em ,I TS ) 应运而生。
一些国家和企业相继启动对智能交通系统为目标的研究与开发, 其中具有代表性的项目包括美国的I n t e l l i D ri v e 、日本的S m artway 及欧洲的e S a fe ty 等P1。虽然不同国家或机构对智能交通系统的定义不一样, 且每个子系统的功能区分不尽相同, 但形成的基本思想都是综合应用先进的信息技术、通信技术、传感器技术、计算机技术、自动控制技术、人工智能等科学技术W 及先进的系统管理措施进一步提高交通系统的运巧效率, 提高车辆的行驶安全性, 减少能源消耗的同时降低对环境的污染, 从而建立起一个高效、安全、环保的综合交通运输体系。
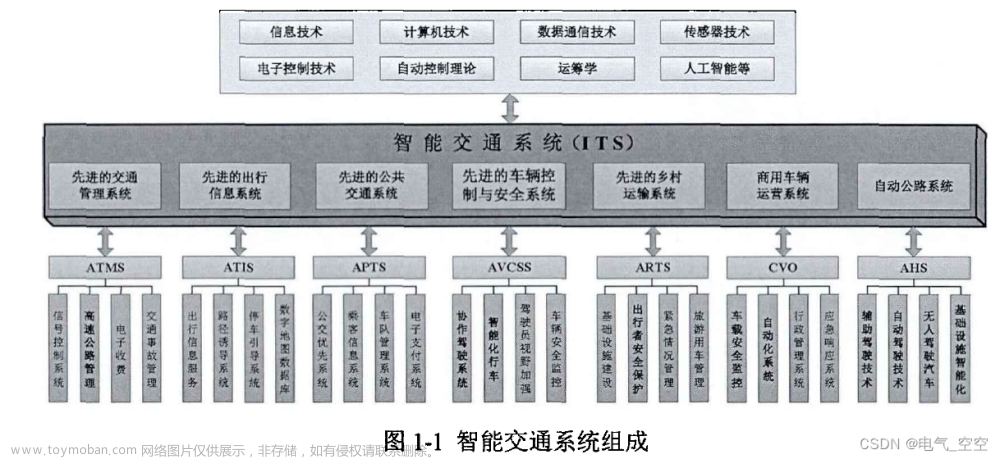
美国将智能交通系统分为七个子系统, 详细内容参见图1-1 。智能交通系统中四个子系统( ATM S 、AV C S S 、C V O 和A H S ) 与智能汽车紧密相关, 尤其是将自动公路系统( A u t o m at e dH i ghwa y S y s t em ,A H S ) 作为一个独立的研巧领域, 其中一项重要任务在于开发一整套能够积极应对未来交通隐患和能源危化的自动驾驶汽车技术, 按照研发过程可W 分为自动驾驶汽车的建模与仿真、自动驾驶汽车的设计与制造、自动驾驶汽车的测试与调试和自动驾驻汽车试点与普及等四个环节。
然而, 自动驾驶汽车的建模与仿真环节贯穿整套技术的研发过程, 是最为基础的环节, 也是最为重要的环节。现阶段对自动驾驶汽车交通建模与仿真的研巧还未涉及对高速公路下旺道巧为的研究, 也鲜有开展对自动驾驶汽车下面道路径优化控制策略的研究。因此, 只有解决类如高速公路出口匯道的交通瓶颈问题, 自动驾驶汽车才能在通行能力和交通安全性上取得根本性突破。
鉴于此, 本论文依托国家自然科学基金项目" 混入自动驾驶汽车的高速公路交通流微观建模与仿真方法研究", 对手动驾驶汽车下化道交通特性的分析基础上, 建立自动驾驶汽车下面道交通流模型, 期通过元胞自动机仿真试验, 测试不同流量和控制策略,获取最优的下匯道路径选择控制策略, 实现自动驾驶汽车在高速公路出口匪道瓶颈位置的通行效率最大化, 为未来面向自动驾驶车的高速公路道路设计和管理运营提供理论参考。文章来源:https://www.toymoban.com/news/detail-733339.html
1 . 2 国内外研究现状
目前, 越来越多的高校和企业投入到自动驾驶汽车的研究中, 包括计算机建模与仿真和实地试验。而在自动驾驶汽车交通流建模与仿真方面, 现有研巧多集中在对自动驾驶汽车跟车的单一巧为研究, 鲜有学者用元胞自动机模型研巧自动驾驶汽车下歴道过程,包括跟车行为、自由换道斤为和强制换道行为, 该过程的交通流模型决定了自动驾驶汽车下匯道研究的复杂性。本节将从自动驾驶汽车的研发进展、交通仿真和实地试验H个方面对国内外的研究现状进行总结和分析, 期能够在前人的研巧基础上进行继承与发展。文章来源地址https://www.toymoban.com/news/detail-733339.html
到了这里,关于自动驾驶汽车下匝道路径优化控制策略研究的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!