1 线性规划
1.1 线性规划问题—linprog
语法:[x,fval,exitflag,output,lambda] = linprog(f,A,b,Aeq,beq,lb,ub,options)
f、x、b、beq、lb 和 ub 是向量,A 和 Aeq 是矩阵。
示例1-1:
f = [-5,-4,-6];
A = [1,-1,1;3,2,4;3,2,0]; %系数矩阵
b = [20,42,30]; %常数项
Aeq = []; beq = [];
lb=[0,0,0];ub = [];x0 = [];
[x,fval,exitflag,output,lambda] = linprog(f,A,b,Aeq,beq,lb,ub,x0);
1.2 混合整数线性规划(MILP)—linprog
语法:[x,fval,exitflag,output] = intlinprog(f,intcon,A,b,Aeq,beq,lb,ub,x0,options)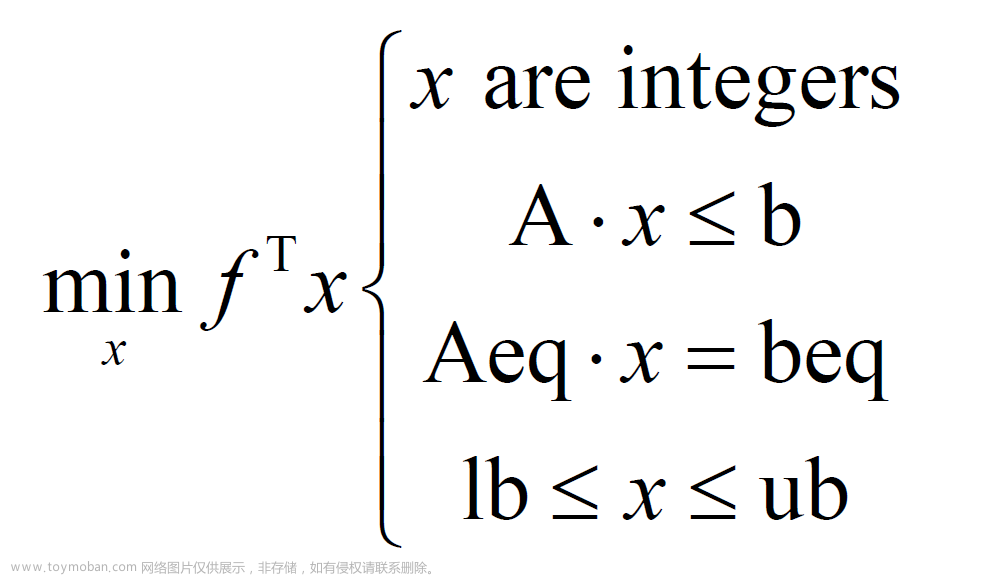
f、x、intcon、b、beq、lb 和 ub 是向量,A 和 Aeq 是矩阵。
2 非线性规划
2.1 约束非线性多变量函数的最小值—fmincon()
语法:x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
- fmincon函数是默认从给定的x0为中心开始搜索,直至找到函数的z最小值,并返回距离x0最近的函数最小值对应的值,在计算的时候就必须预先判定函数最小值的对应的x值的大概范围,确保定的初值x0在所求的x附近,以减少计算量。
- fmincon求解优化问题,最优解不一定唯一。选择不同的迭代初始值x0,可能得到不同的局部最优解(局部最优解不一定为全局最优解)
clc; close all; clear; % 寻找约束非线性多变量函数的最小值
fun = @(x)x; % 目标函数
x0=[]; % 初始值, length(x0) = 自变量个数, 从x0开始
A=[]; % 系数矩阵 A*x <= b
b=[]; % 向量
Aeq=[]; % 系数矩阵 Aeq*x = beq
beq=[]; % 向量
lb=[]; % 自变量约束边界 lb(1) <= x(1) <= ub(1) lb(2) <= x(2) <= ub(2)
ub=[]; % 如果 x(i) 无下界,请设置 lb(i) = -Inf,如果 x(i) 无上界,请设置 ub(i) = Inf。
nonlcon = []; % 非线性约束
option=[]; %options = optimset('Display','iter'); %在每次迭代时显示输出
[x,f]=fmincon(fun ,x0,A,b,Aeq,beq,lb,ub,nonlcon,option);
示例1:求解有约束最优化问题(常规—线性约束函数)
fun = @(x)-(x(2)+x(1)*cos(x(3)))*x(1)*sin(x(3)); % 目标函数
x0=[25;20;1]; % 初始值, length(x0) = 自变量个数, 从x0开始
A=[]; b=[];
Aeq=[2,1,0]; beq=100;
lb=[0;0;0]; ub=[100;100;pi/2]; % 自变量约束边界 lb(1) <= x(1) <= ub(1) lb(2) <= x(2) <= ub(2)
[x,f]=fmincon(fun ,x0,A,b,Aeq,beq,lb,ub);
示例2-1:求解有约束最优化问题(难—单个非线性约束函数)
【步骤1】:定义非线性约束函数
function [c, ceq] = WT_1_non(x)
c=9-x(1)^2-x(2)^2; %定义非线性约束函数, C*x <= 0;
ceq=[]; %Ceq*x=0;
【步骤2】:定义目标函数
fun = @(x) x(1)^4-4*x(1)-8*x(2)+15; %定义目标函数
nonlcon = @(x)WT_1_non(x); %定义非线性约束函数,@WT_1_non
A=[2 3;-1,1];
b=[2;5];
[x,fval]=fmincon(fun,[0,1],A,b,[],[],[],[],nonlcon);
示例2-2:求解有约束最优化问题(难—多个非线性约束函数)
【步骤1】:定义非线性约束函数
function [c, ceq] = fun_constraint(x)
c=[3+x(1)*x(2)-x(1)-x(2);x(1)*x(2)-12];
ceq=[];
【步骤2】:定义目标函数
fun = @(x)exp(x(1))*(x(1)^2+2*x(2)^2+3*x(1)*x(2)+5*x(1)+4*x(2)+2); % 目标函数
fun_con = @fun_constraint; %非线性约束函数
x0=[-1,1]; % 初始值, length(x0) = 自变量个数, 从x0开始
A=[]; b=[];
Aeq=[1,2]; beq=0;
lb=[]; ub=[]; % 自变量约束边界 lb(1) <= x(1) <= ub(1) lb(2) <= x(2) <= ub(2)
[x,f]=fmincon(fun ,x0,A,b,Aeq,beq,lb,ub,fun_con);
示例2-3:求解有约束最优化问题(难—多个非线性约束函数)
将问题模型转化为标准形式
【步骤1】:定义非线性约束函数
function [c, ceq] = fun_constraint(x)
c=[x(1)^2*x(2)-675;x(1)^2*x(3)^2/10^7-0.419];
ceq=[];
【步骤2】:定义目标函数
fun = @(x)-0.201*x(1)^4*x(2)*x(3)^2/10^7; % 目标函数
fun_con = @fun_constraint; %非线性约束函数
x0=[4;5;50]; % 初始值, length(x0) = 自变量个数, 从x0开始
A=[]; b=[];
Aeq=[]; beq=[];
lb=[0;0;0]; ub=[36;5;125]; % 自变量约束边界 lb(1) <= x(1) <= ub(1) lb(2) <= x(2) <= ub(2)
[x,f]=fmincon(fun ,x0,A,b,Aeq,beq,lb,ub,fun_con);
示例3:将梯度计算加入目标函数中,以实现更快或更可靠的计算。
【步骤1】:定义梯度函数
function [f,g] = Learn_C_Ti(x)
f = 100*(x(2) - x(1)^2)^2 + (1-x(1))^2;% Calculate objective f
if nargout > 1 % gradient required
g = [-400*(x(2)-x(1)^2)*x(1)-2*(1-x(1));
200*(x(2)-x(1)^2)];
end
【步骤2】:定义目标函数
options = optimoptions('fmincon','SpecifyObjectiveGradient',true);%创建使用目标函数梯度的选项。
fun = @Learn_C_Ti;
x0 = [-1,2];
A = [];b = [];
Aeq = [];beq = [];
lb = [-2,-2];ub = [2,2];
nonlcon = [];
x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options);
2.2 求解半无限约束多变量非线性函数的最小值 —fseminf()
语法:x = fseminf(fun,x0,ntheta,seminfcon,A,b,Aeq,beq,lb,ub,options)
2.3 寻找能够最小化一组目标函数最大值的点—fminimax()
语法:x = fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
示例:求解函数组取极小-极大值时X的值。
【步骤1】:定义非线性约束函数
function f = fun7(x)
f = [2*x(1)^2+x(2)^2-48*x(1)-40*x(2)+304
-x(1)^2 - 3*x(2)^2
x(1)+3*x(2)-18
-x(1)-x(2)
x(1)+x(2)-8];
【步骤2】:定义主函数
clc,clear
[x,y] = fminimax(@fun7,rand(2,1))
2.4 无导数法计算无约束多变量函数的最小值—fminsearch()
语法:x = fminsearch(fun,x0,options)
示例:
fun = @(x)100*(x(2) - x(1)^2)^2 + (1 - x(1))^2; %函数
x0 = [-1.2,1]; %自变量区间
options = optimset('Display','iter'); %在每次迭代时显示输出
x = fminsearch(fun,x0,options)
fminsearch函数是求解多元函数最小值,需给定初值x0,它采用复形搜索法;
2.5 其他
- x = fminbnd(fun,x1,x2) %查找单变量函数在定区间上的最小值, 区间[x1,x2]

fun = @(x)(x^3+cos(x)+x*log(x))/exp(x);
[x,fval]=fminbnd(fun,0,2);
总结:fminbnd函数是针对于一元函数求最小值的函数,它是采用的黄金分割法和抛物线插值法,只能求一元连续函数在闭区间上的极值,有时只能求局部极值,若在边界达到极值,求解速度较慢;
- x = fminunc(fun,x0,options)%求无约束多变量函数的最小值
示例:
fun=@(x)x(1)^3+x(2)^3-3*x(1)*x(2);
[x,fval]=fminunc(fun,[0.5,3]);
- fminunc与fminsearch类似,它采用大规模内点反射牛顿迭代法或中小规模的拟牛顿法,速度快于fminsearch;故对于求解极值问题可以优先考虑使用fminunc函数.
- 当目标函数阶数大于2时,fminunc()比fminsearch()更有效;当目标函数高度不连续时,fminsearch()更具稳健性。
3 二次规划—quadprog()
语法:x = quadprog(H,f,A,b,Aeq,beq,lb,ub,x0,options)
示例1:
将二次规划转化为标准形式: 文章来源:https://www.toymoban.com/news/detail-784918.html
文章来源:https://www.toymoban.com/news/detail-784918.html
H=[4,-1;-1,2];f=[-3;-5];
A=[1,1;-1,2];b=[5;4];
Aeq=[]; % 系数矩阵 Aeq*x = beq
beq=[]; % 向量
lb=[0;0];ub =[];x0 =[];
options = optimset('Display','iter'); %在每次迭代时显示输出
[x,fval]=quadprog(H,f,A,b,Aeq,beq,lb,ub,x0,options);
示例2:
将二次规划转化为标准形式: 文章来源地址https://www.toymoban.com/news/detail-784918.html
文章来源地址https://www.toymoban.com/news/detail-784918.html
H=[2,1,1;1,2,0;1,0,2];f=[-5;-3;-6];
A=[5,4,7];b=22;
Aeq=[]; % 系数矩阵 Aeq*x = beq
beq=[]; % 向量
lb=[0;0;0];ub =[];x0 =[];
options = optimset('Display','iter'); %在每次迭代时显示输出
[x,fval]=quadprog(H,f,A,b,Aeq,beq,lb,ub,x0,options);
到了这里,关于Matlab 优化工具箱的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!












