惯性传感器单元 IMU
IMU 是 Inertial Measurement Unit 的缩写, 直接翻译过来就是惯性测量单元, 常见的有单独的三轴加速度(Accelerometer)计 ADXL345, L3G4200D, L3GD20等, 单独的三轴角速度计(又称陀螺仪, Gyroscope) LIS3DH, L3GD20H, BMG160, 以及包含了加速度计和陀螺仪的六轴运动传感器 MPU6050, MPU6500, MPU6881, BMI160等, 以及带电子罗盘的九轴运动传感器 MPU9250, MPU9255等.
在判断物体在空间中的姿态以及运动轨迹时, 用得最多的是加速度和角速度传感器. 加速度传感器可以计算倾角, 陀螺仪可以计算角速度, 这两种传感器各自的特点为
- 陀螺仪: 动态特性好, 因为测量噪声(误差)的存在, 以及各向灵敏度的差异, 通过积分计算角度会累积误差, 导致结果越来越不准
- 加速度计: 不会累积误差, 所以准确度有保证, 但是动态响应差, 不适用于角度变化快速的场景.
如果设备运动速度较慢, 作用于系统的加速度力主要是重力, 可以使用加速度计来计算倾角, 利用重力矢量及其在加速度计轴上的投影(即对应读数)来确定倾角. 由于重力是恒定加速度, 如果存在额外的恒定加速度也会影响计算结果. 额外的恒定加速度包括发动机持续加速以及设备自身匀速的旋转等.
通过加速度计算倾角
静止和慢速物体因为主要加速度来源为重力, 用加速度传感器可以计算得到物体的倾角.
单轴数据计算倾角
假设X轴上测到的加速度值为 \(a_x\) 定义倾角 \(α\) 为X轴与水平面(与重力矢量垂直的平面)的夹角, 计算为
当 \(a_x = 0\) 时, 倾角为0, X轴处于水平位置, 当\(a_x = g\) 时, 倾角90°, 处于垂直位置, 当 \(a_x\) 的值很小时, 可以用近似公式 \(sin(α) ≈ α\), 于是
比例系数k用于角度的线性近似计算
\(a_x\) 的读数匹配 \(sin(α)\) 曲线, 读数值范围为 \(-1g ~ 1g\), 在读数为0(水平位置)时灵敏度最高, 在读数为 \(+-1g\) 时灵敏度最低.
双轴加速度数据计算倾角
单轴无法判断方向, 因为在倾角为 \(α\) 和 \(180° - α\) 时读数是一样的. 如果增加一个与X轴垂直的轴, 假定为Z轴, 且XZ轴形成的平面垂直于水平面, 那么XZ轴在这个平面里形成的对水平面的倾角就可以判断方向, 并且结果较为精确, 因为总会有一个轴处于灵敏度较高的区间.
当XZ轴形成的平面垂直于水平面时, X轴倾角可以用两个轴的读数进行计算.
\(a_x\)为0时, 倾角为0, X轴处于水平, 当\(a_z\)为0时要注意避免零除. 如果XZ轴平面不垂直于水平面, 这个结果会小于实际的倾角, 倾斜越厉害误差越大.
三轴加速度数据计算倾角
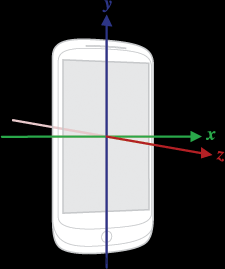
假设传感器Z轴垂直朝下, X轴朝正前方, 则X轴与水平面之间的夹角为俯仰角(pitch) \(α\), Y轴与水平面间的夹角为横滚角(roll) \(β\), 航向角yaw需要地磁传感器, 无法通过加速度传感器计算. Z轴垂直于X轴和Y轴, 和两轴数值是相关的, 并没有独立性, 仅用于判断设备上下的朝向. 令Z轴与水平面的夹角为 \(γ\)
重力加速度在XYZ三个轴上的投影即为三个轴传感器的读数, 可以将三轴倾角和重力加速度想像为一个斜立的长方体, 长方体的对角线为重力加速度, 对角线就是这个角对应的三条边, 倾角的计算方法为
带运动加速度的倾角计算
上面的计算方式适合相对静止和慢速的场景, 当物体受作用于多个外力时, 作用于传感器的综合加速度为重力与各外力的叠加, 此时加速度的方向就不是重力的方向, 上面的计算方式就不适用了, 因为综合加速度可能比 \(g\) 更大或更小.
对于一个物体, 整体加速度等于三轴加速度的矢量和, 其大小 \(G\) 可以通过三个向量的大小计算得到
由此可以得到运动状态下倾角的计算
因为 \(a_x\), \(G\), \(\sqrt[2]{{a_y}^2 + {a_z}^2}\) 三个矢量形成直角三角形, 上面的式子可以也可以用 \(tan^{-1}\) 计算
此时的倾角并非相对重力加速度的倾角, 而是相对物体整体加速度矢量的倾角, 例如物体向前(X轴方向)加速运动时, 整体加速度方向会向后倾斜, 当物体左转时, 离心力会导致整体加速度方向向右倾斜. 计算此时的姿态倾角, 可以用于帮助物体在当前的运动状态上保持平衡.
互补滤波
通过加速度传感器(Accelerometer)可以使用反三角函数\(sin^{-1}\)和\(tan^{-1}\)求静止和慢速运动物体的倾角, 对于高速运动的物体, 需要结合陀螺仪的角速度读数快速响应倾角变化. 对于这两种传感器读数的结合, 通常采用互补滤波算法.
互补滤波就是在短时间内采用陀螺仪得到的角度做为最优值, 定时用加速度值来校正陀螺仪的得到的角度. 加速度计要滤掉高频信号, 陀螺仪要滤掉低频信号, 互补滤波器就是根据传感器特性不同, 通过不同的滤波器, 相加得到整个频带的信号.
互补滤波的公式为
其中
- \(α_n\) 互补计算得到的角度
- \(α_{n-1}\) 前一次计算得到的角度
- \(\delta_α\) 陀螺仪得到的角速度
- \(dt\) 两次计算的时间间隔
- \(α^{\prime}\) 通过加速度计得到的倾角
- \(k\) 和 \(1-k\) 为加权系数, 和为 1
加权系数的确定. 在 《The Balance Filter》 中提到关于加权系数的求解公式, 先设滤波器的加权系数为 \(α\), 时间常数为为 \(τ\), 运行周期为 \(dt\), 那么公式为
运行周期 dt 根据运行周期确定, 如果互补滤波器方法的调用频率为 200次每秒, 那么 \(dt = \frac{1000ms}{200} = 5ms\)
时间常数 \(τ\) 的取值根据系统的实际需求调整,
不同的系统的 \(τ\) 值不一定相同. \(τ\)取值越大则陀螺仪权重越大, \(τ\)取值越小则加速度传感器的权重越大. 通常互补滤波器对陀螺仪的权重会大些, 以降低加速度传感器中噪声的影响. 例如互补滤波器运行间隔为 10ms, 时间常数 \(τ =0.49\), 那么此时加权系数为:
C语言代码文章来源:https://www.toymoban.com/news/detail-837755.html
// a = tau / (tau + dt)
// acc = 加速度传感器数据
// gyro = 陀螺仪数据
// dt = 运行周期
float angle;
float a;
float ComplementaryFliter(float acc, float gyro, float dt)
{
a = 0.98;
angle = a * (angle + gyro * dt) + (1 - a) * (acc);
return angle;
}
在实际应用中, 因为加速度计和角速度计读取的数据存在很大的噪音, 直接使用会造成反馈的不稳定(抖动), 需要在计算前通过卡尔曼滤波器等进行平滑.文章来源地址https://www.toymoban.com/news/detail-837755.html
参考
- 倾角计算 https://www.analog.com/cn/resources/app-notes/an-1057.html
到了这里,关于惯性传感器的倾角计算的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!