自上世纪九十年代毫米波雷达首次前装量产上车起,已经经过了二十多个年头。近年来,随着新能源汽车智能化大潮来袭,主机厂对毫米波雷达的需求与日俱增,尤其是在辅助驾驶领域,不管是入门级L2,还是高阶NOA,毫米波雷达的单车搭载数量均显著提升。据研究数据显示,随着L2及L2+功能持续处于增长的高速期,到2025年,毫米波雷达搭载总量将达到3500万颗以上,年复合增长率在30%左右。在当前各行各业不断内卷、裁员降薪的大背景下,车载毫米波雷达是一条为数不多能够保持持续增长的赛道。

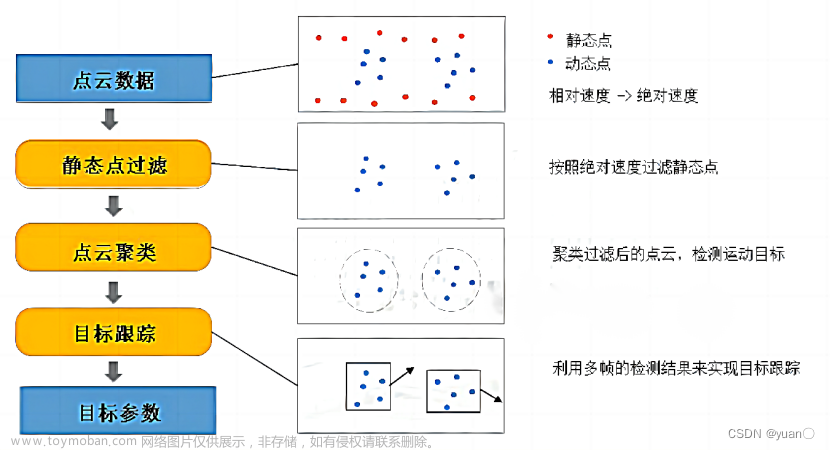
毫米波雷达通过发射和接收毫米波进行工作,当前车载毫米波雷达以FMCW体制为主,常用工作主频在77GHz左右,具备高精度的测距、测速与测角能力。可同时对多个运动目标及静止目标进行管理和追踪,完成对周遭环境的感知建模。同时毫米波雷达还具有体积小、易集成、性价比高的特点,因此是辅助驾驶领域的核心传感器之一。随着传统毫米波雷达向4D成像雷达演进,原先对于传统毫米波雷达“卡脖子”的测高问题、点云稀疏问题等也有了解决方案。可以说,4D成像雷达是未来毫米波雷达的发展方向,使毫米波雷达在L4及以上自动驾驶领域占有了一席之地。

然而,与视觉感知技术、激光雷达3D点云感知技术不同,毫米波雷达的感知技术无论是在课堂上还是论坛里几乎是空白,但这不代表业界对相关技术人才的需求也是空白,恰恰相反,从主机厂到Tier1,甚至Tier2都急需毫米波雷达领域有工作经验的人才。而正是相关领域know-how的缺失,造成了初学者在接触毫米波雷达感知时不知道如何下手,很多人也不清楚雷达标定及遮挡检测的重要性,对于实际运用中如何调节滤波参数、如何选取目标生成的阈值、如何后处理也是一知半解,更不必提其中涉及很多只有经历过量产项目才能了解的小技巧。
在深入调研大家的需求后,我们选择了行业内主流的毫米波雷达感知框架,从0到1为大家详细展示雷达测距、测速、测角原理以及点云提取、目标生成、目标追踪等方方面面,内容非常详细!为帮助大家更好理解及收获更多知识,还贴心配备很多量产实战课程,在量产实战的背景下深入理解需求,学会分析问题、解决问题的思路。这是国内首门完整的毫末波雷达(包括4D毫米波雷达)理论与实战教程,一骑绝尘! 非常适合刚入门的小白以及需要在业务上优化算法的同学学习,也很适合想要系统地了解新方向的其他方向从业人员。
课程大纲如下:

主讲老师
晓畅Auto,硕士毕业于德国Top2高校,目前就职于头部Tier1自动驾驶部门,高级算法工程师,主要负责毫米波雷达环境感知算法量产及研发。以第一发明人在毫米波雷达相关领域拥有三项发明专利。负责国内传统主机厂及造车新势力多款车型的毫米波雷达量产开发,熟悉量产项目中的痛点问题,具有丰富的量产落地经验。
本课程适合人群
-
计算机视觉与自动驾驶感知(特别是毫米波雷达)相关研究方向的本科/硕士/博士;
-
备战秋招和春招、实习、社招的相关方向同学;
-
自动驾驶2D/3D感知相关算法工程人员;
-
想要转入毫米波感知算法的小伙伴;
-
工作上需要提升的算法工程人员及企业技术管理人员;
本课程需要具备的基础
-
具有一定的python和C语言基础,熟悉信号处理常用的一些基础算法;
-
对毫米波雷达目标检测与追踪方案有浅显了解;
-
一定的线性代数和矩阵论、概率论基础;
学后收获
-
能够对毫米波雷达信号处理流程、目标检测与跟踪有系统和深入的理解。
-
能够对近期4D毫米波雷达的技术趋势发展和相关成果有一定的了解。
-
学习到如何分析量产过程中碰到的实际问题,掌握其解决思路和方法。
-
学完本课程能够达到1年左右的毫米波雷达工程师水平。
-
认识多行业从业人员与学习合作伙伴,并在交流中达到更加深入的理解。
开课时间
2023.11.15号正式开课,加入我们一起学习,开课后2个月结课,离线教学,微信群内答疑(交流环境非常好,非常重要的部分)!
课程咨询
扫码加入学习!

欢迎加入学习!

咨询小助理微信咨询:AIDriver004
版权声明
自动驾驶之心所有课程最终版权均归自动驾驶之心团队及旗下公司所属,我们强烈谴责非法盗录行为,对违法行为将第一时间寄出律师函。也欢迎同学们监督举报,对热心监督举报的同学,我们将予以重报!文章来源:https://www.toymoban.com/news/detail-841427.html
投诉微信:AIDriver004(备注:盗版举报)文章来源地址https://www.toymoban.com/news/detail-841427.html
到了这里,关于国内首门3D毫米波&4D毫米波雷达理论实战路线来了!的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!