声明:作者是做嵌入式软件开发的,并非专业的硬件设计人员,笔记内容根据自己的经验和对协议的理解输出,肯定存在有些理解和翻译不到位的地方,有疑问请参考原始规范看
Skew Calibration
对于大于1.5Gbps的情况,需要发送器发送一个特殊的去偏斜(deskew)burst,让接收器做去偏斜功能。当工作速率在1.5Gbps以上或将速率变到1.5Gbps以上时,在高速数据传输之前需要传输一个初始去偏斜序列(initial deskew sequence)。当工作速率在1.5Gbps以下时,传输初始去斜序列是可选的。周期性的去偏斜功能(periodic deskew)和数据速率无关,是可选的功能。
在切换状态的过程中,比如从ULPS切换到HS,传输deskew sequence是可选的,这里假设HS操作会恢复到之前发送初始去偏斜序列的时候的速率。
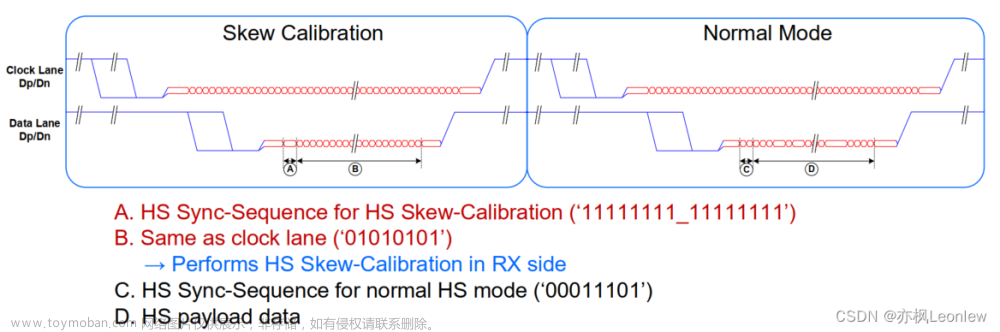
图1 High-Speed Data Transmission in Skew-Calibration with LP Mode
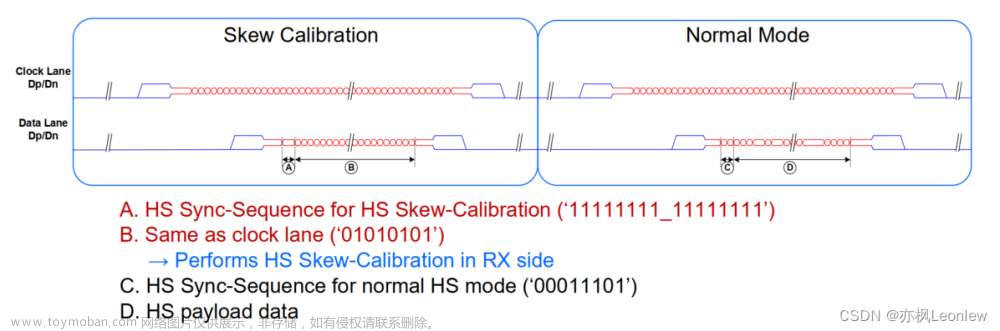
图2 High-Speed Data Transmission in Skew-Calibration with ALP Mode
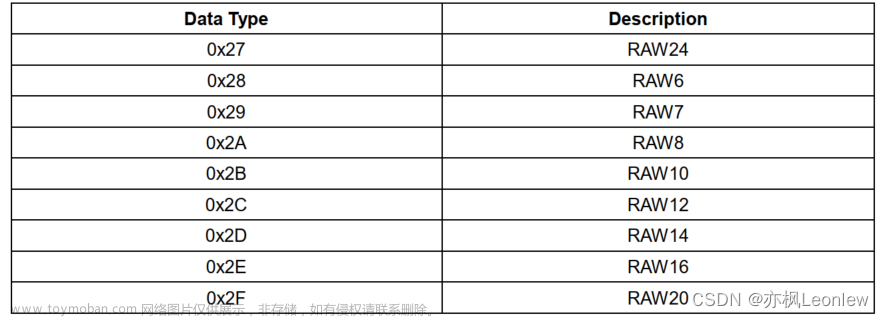
发送器deskew burst使用一个全部由‘1’组成的同步帧(同步模式,sync pattern),持续16个UI(Unit Interval,在Global Timing Parameters中有说明,也可以参考规范2.4节Acronyms)。Sync pattern发送之后,载荷部分是一个clock pattern(01010101...),对于初始去偏斜序列来说,最小持续个UI;对于周期性去偏斜校准序列来说,最小持续个UI。
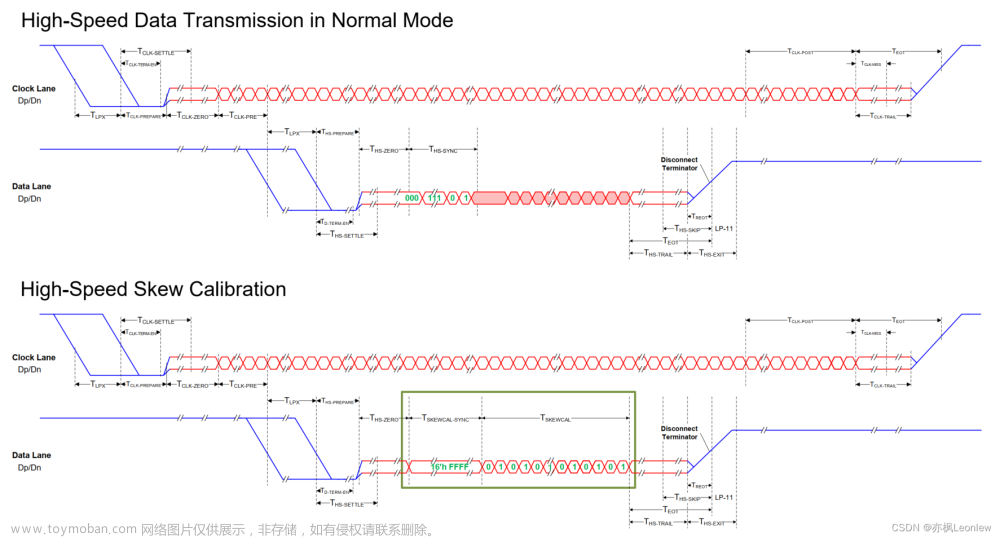
图3 Normal Mode vs Skew Calibration with LP Mode
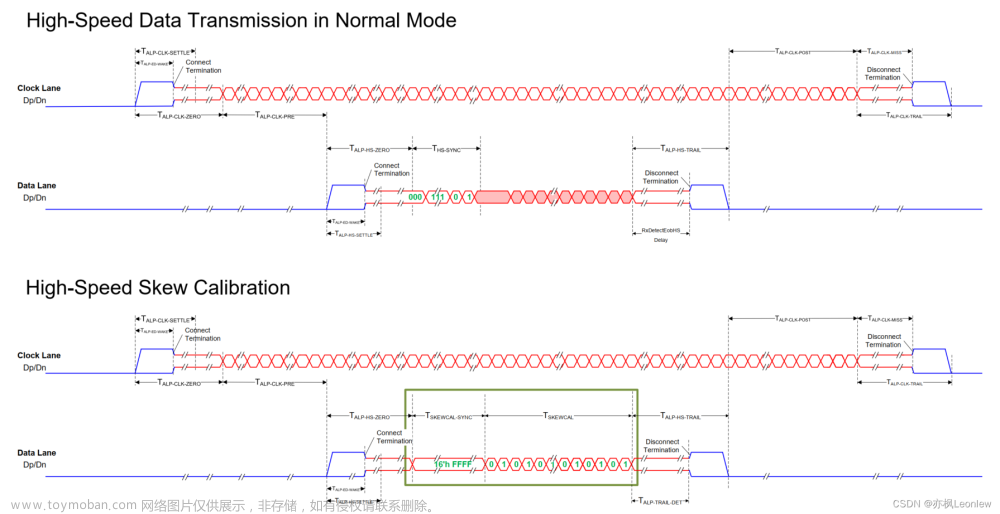
图4 Normal Mode vs Skew Calibration with ALP Mode
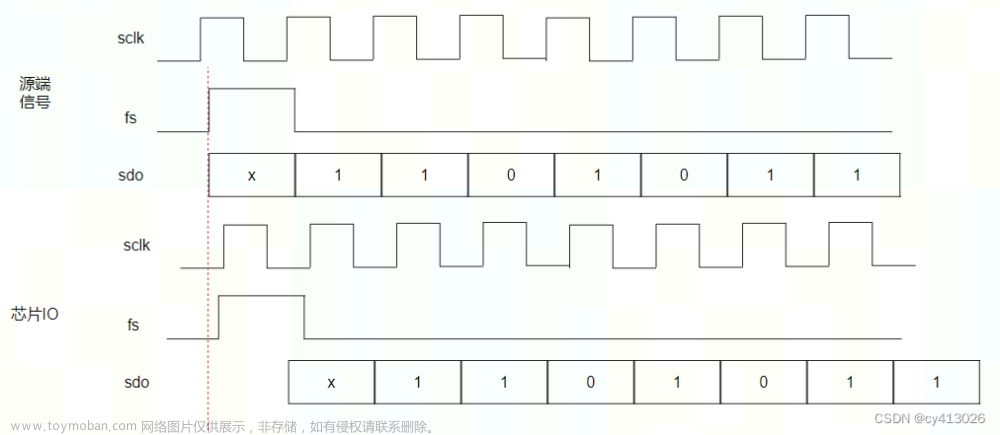
接收器在检测到deskew sync pattern的时候,启动去偏斜校准(deskew calibration)。发送器端,deskew sequence要在发送器配置控制下同时在所有活动的Lanes上发起传输。LP模式下,start-of-transmission和end-of-transmission序列描述如下面两张图所示:
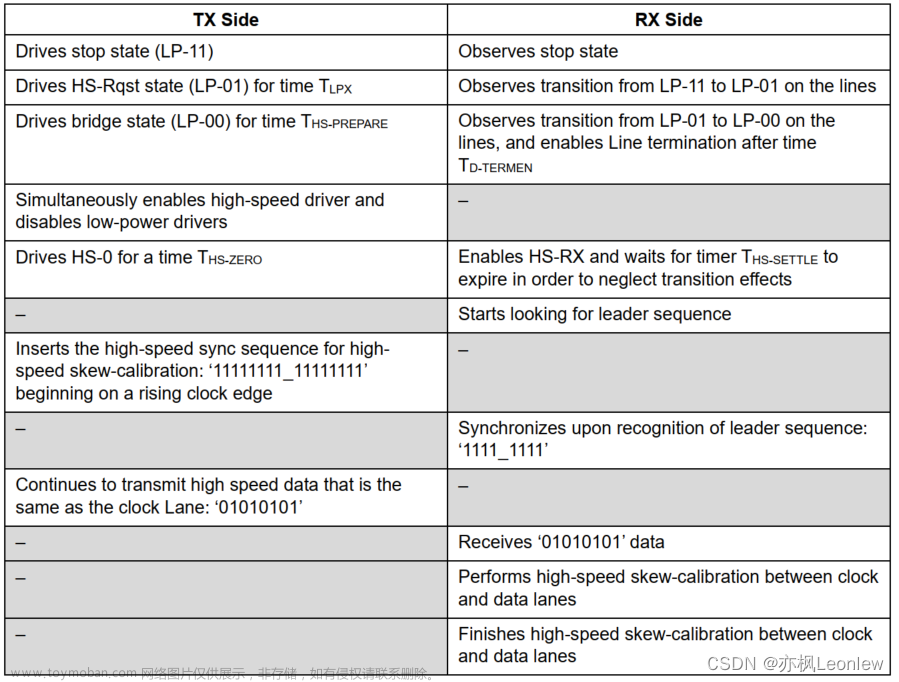
图5 Start-of-Skew Calibration Sequence
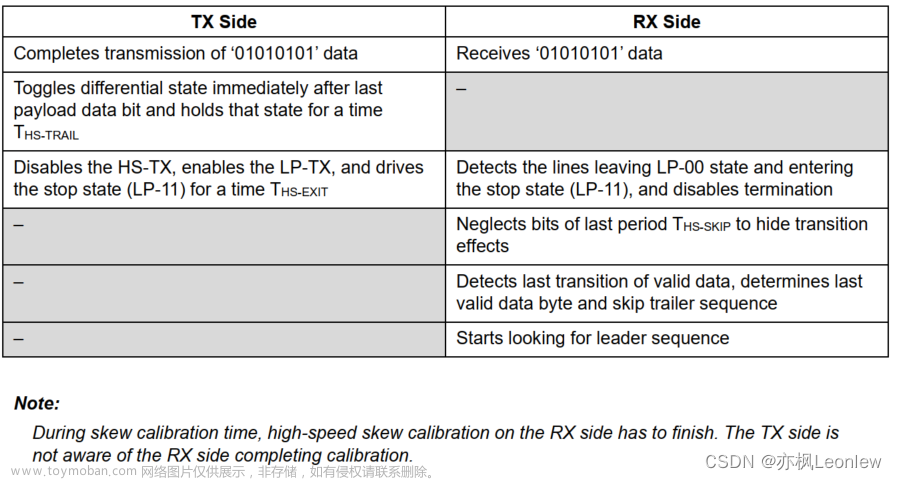
图6 End-of-Skew Calibration Sequence
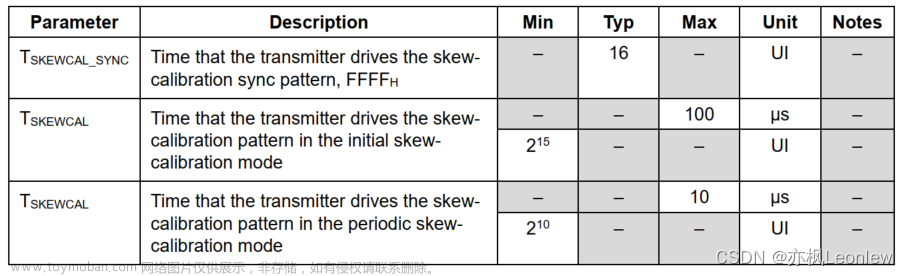
图7 Skew-Calibration Timing Parameters
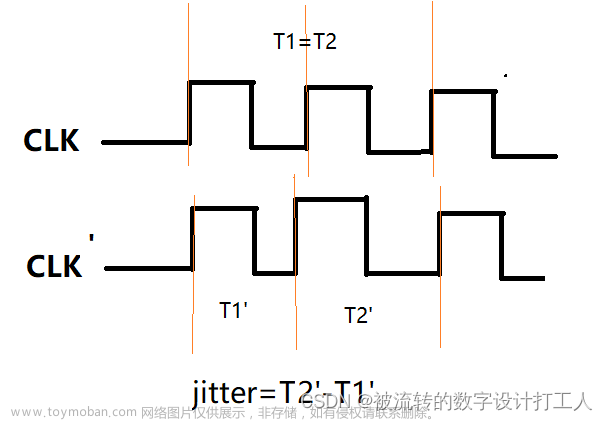
对于周期性deskew calibration来说,发送器在发送一个deskew序列前,先要结束当前的burst。在接收器deskew calibration器件,在接收器的输入端会出现抖动的信号。接收器deskew模块要带展频时钟(Spread Spectrum Clocking)功能,保证正常运作。
Alternate Calibration Sequence
Alternate Calibration Sequence的出现主要是为了补偿符号间干扰(inter-symbol interference) 。它和Initial Skew Calibration组合使用。当工作速率在2.5Gbos以上或切换到2.5Gbps以上时,在Initial Skew Calibration之后,要发送一个Alternate Calibration Sequence,这个序列由一个带头的HS0 pattern,一个Calibration Sync和一个Calibration Pattern组成。这个校准过程需要在链路上电,以及(或者)在链路重新初始化的时候进行。对于工作速率低于2.5Gbps的情况,Alternate Calibration Sequence是个可选项。
如果接收器不需要或不支持这个特性,系统集成者可以禁用掉Alternate Calibration Sequence。

图8 Initial Calibration Sequence Including Alternate Calibration Sequence with LP
Mode
Alternate Calibration Sequence使用的Alternate Calibration Sync,其持续时间为。当Alternate Calibration Sync发送之后,载荷是一个PRBS9序列,其最小持续时间为。
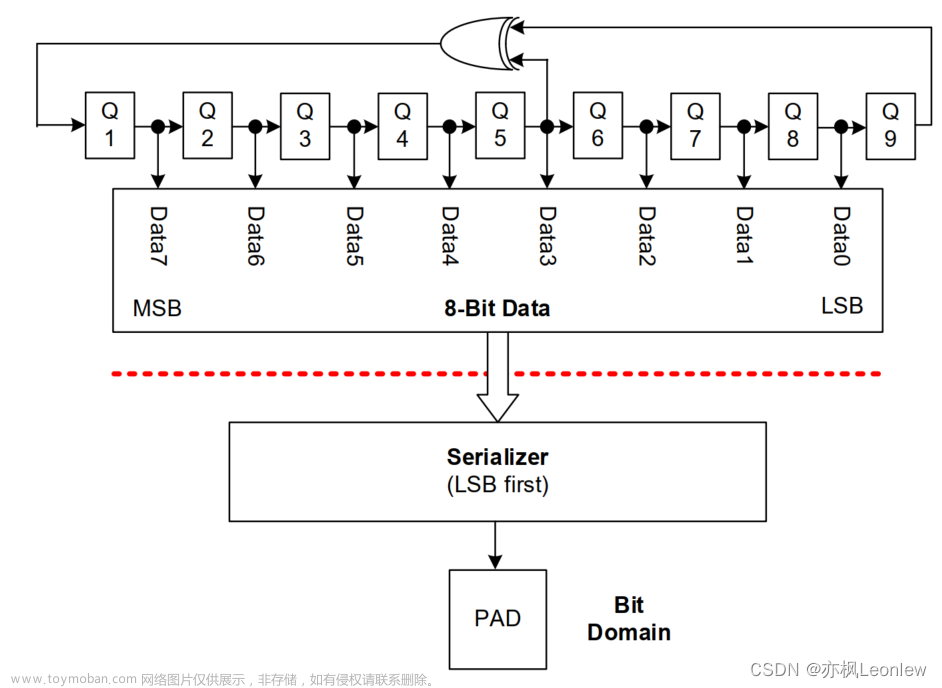
PRBS9序列通过多项式定义。PRBS9序列生成器(PRBS9 sequence generator)要在Alternate Calibration过程之前被初始化好,初始化时使用一个初始的9-bit seed值011111111(Q9:Q1)。载荷部分的前8-bit是PRBS9序列生成器寄存器Q1到Q8中的seed的值。在后续每一个8-bit字被输出到Data[7:0]之前,PRBS9序列生成器要做8次移位操作。
16-bit和32-bit的数据接口使用的也是相同的多项式。在后续每一个16-bit/32-bit字被输出到Data[15:0]/Data[31:0]之前,PRBS9序列生成器要做16/32次移位操作。
 文章来源:https://www.toymoban.com/news/detail-647427.html
文章来源:https://www.toymoban.com/news/detail-647427.html
图9 PRBS Generator and Connection to the Serializer文章来源地址https://www.toymoban.com/news/detail-647427.html
到了这里,关于MIPI D-PHYv2.5笔记(15) -- Skew Calibration和Alternate Calibration Sequence的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!



![mipi接口 1280(RGB)*720 LCD屏开发驱动笔记帖
1、MTK8788[android 9.0]GT9XX TP触摸屏驱动流程分析](https://imgs.yssmx.com/Uploads/2024/01/403910-1.png)



