今日份题目:
地上有一个m行n列的方格,从坐标 [0,0] 到坐标 [m-1,n-1] 。一个机器人从坐标 [0, 0]的格子开始移动,它每次可以向左、右、上、下移动一格(不能移动到方格外),也不能进入行坐标和列坐标的数位之和大于k的格子。例如,当k为18时,机器人能够进入方格 [35, 37] ,因为3+5+3+7=18。但它不能进入方格 [35, 38],因为3+5+3+8=19。请问该机器人能够到达多少个格子?
示例1
输入:m = 2, n = 3, k = 1 输出:3
示例2
输入:m = 3, n = 1, k = 0 输出:1
提示
-
1 <= n,m <= 100 -
0 <= k <= 20
题目思路
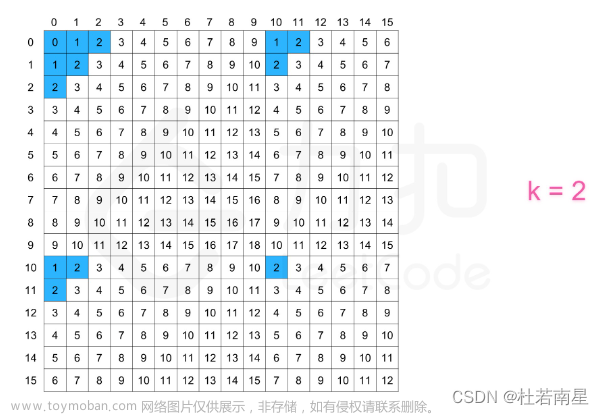
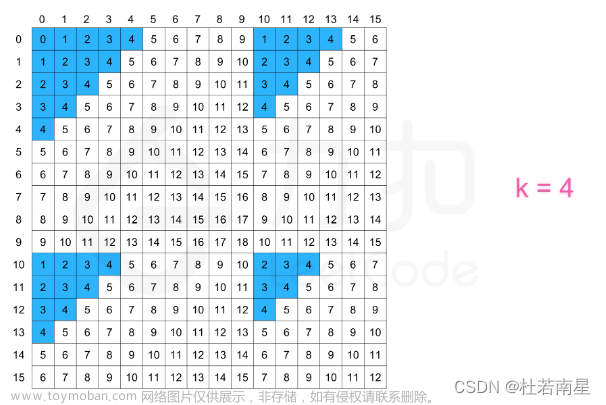
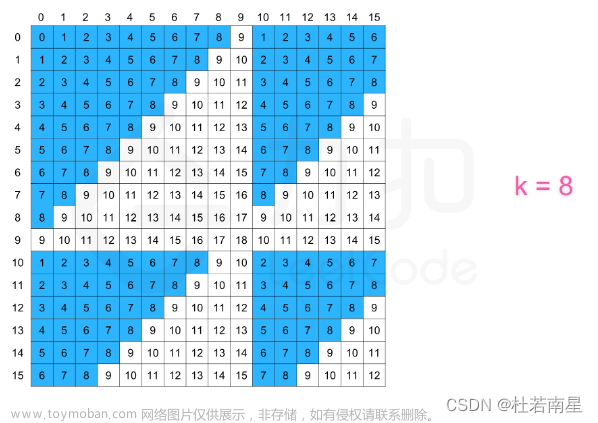
由于机器人是从(0,0)开始走,并不一定能走过所有格子,甚至不一定能走到右下角,所以其实是个搜索过程,故使用广度优先遍历,将满足条件(坐标在格子内且位数和小于k)的点坐标放入队列,每次从队列中取出第一个点坐标判断向下向右两个点左边,然后继续,直到队列不为空。剪枝,只考虑向下向右两个方向即可,这是由本题规律得出的,随着k的增大,可行区域都是增加在右和下两个方向的:
补充:方向
代码
class Solution
{
public:
int num(int x) //计算x的数位之和
{
string s=to_string(x);//将int型数据转换成字符串类型
int res=0;
for(int i=0;i<s.length();i++)
{
res+=s[i]-'0';//计算各位之和
}
return res;
}
int movingCount(int m, int n, int k)
{
if(k==0) return 1;
queue<pair<int,int> > p;
//向右和向下的方向数组
int dx[2]={0,1};
int dy[2]={1,0};
int visited[200][200]={0};//用于标记是否到达过
//从(0,0)开始
p.push({0,0});
visited[0][0]=1;
int ans=1;
//bfs广度优先遍历
while(!p.empty())
{
pair<int,int> xy=p.front();
p.pop();
for(int i=0;i<2;i++) //遍历两个方向
{
int tx=dx[i]+xy.first;
int ty=dy[i]+xy.second;
if(tx<0||tx>=m||ty<0||ty>=n||visited[tx][ty]==1||num(tx)+num(ty)>k) continue;//避免到方格外、被遍历过、数位之和大于k
p.push({tx,ty});
visited[tx][ty]=1;
ans++;
}
}
return ans;
}
};
提交结果
 文章来源:https://www.toymoban.com/news/detail-648262.html
文章来源:https://www.toymoban.com/news/detail-648262.html
欢迎大家在评论区讨论,如有不懂的代码部分,欢迎在评论区留言!文章来源地址https://www.toymoban.com/news/detail-648262.html
到了这里,关于每天一道leetcode:剑指 Offer 13. 机器人的运动范围(中等&广度优先遍历&剪枝)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!