一、文章内容简述:
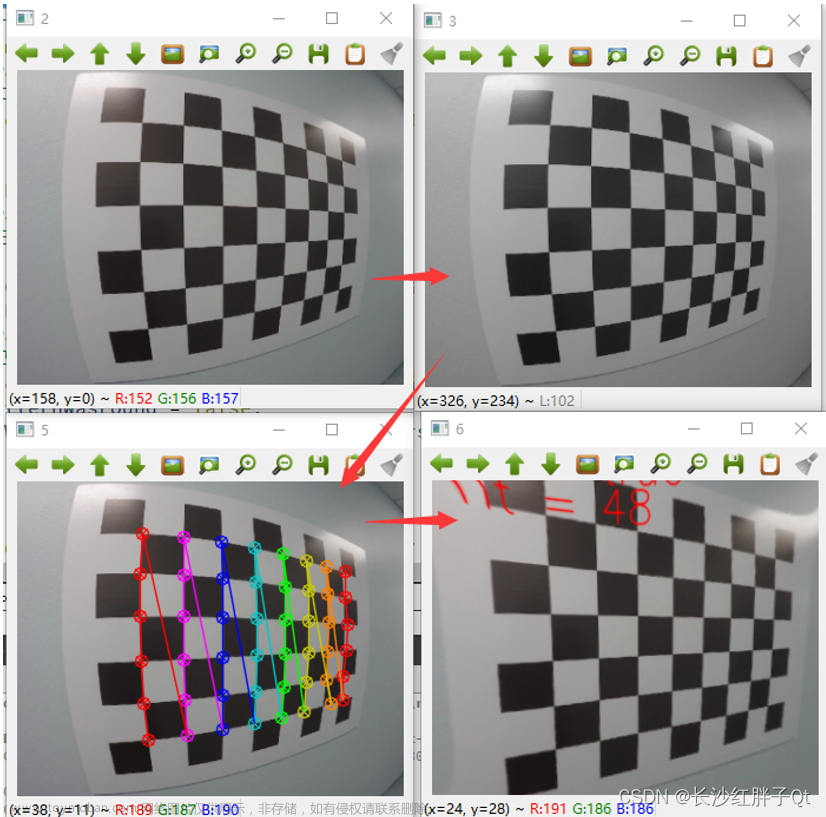
1’ 通过cv::findChessboardCorners寻找棋盘格角点
2‘ 用cv::solvePnP计算旋转向量rvec和平移向量tvec
3’ 通过公式计算相机到棋盘格的距离
float distance = sqrt(tvec.at<double>(0,0) * tvec.at<double>(0,0) + tvec.at<double>(1,0) * tvec.at<double>(1,0) + tvec.at<double>(2,0) * tvec.at<double>(2,0)) / 10;
二、实现过程
已完成单目相机标定的情况下:
(可以参考 虽然是我很久之前写的python的,但实现是没啥问题)
需要以下内容:
1、已知相机的内参矩阵cameraMatrix和畸变参数distCoeffs(相机标定)
2、需要拍摄一张棋盘格图像
3、需要知道棋盘格的w方向和h方向角点数量
实现代码如下:
#include <opencv2/opencv.hpp>
int main() {
// 读取棋盘格图像
cv::Mat image = cv::imread("chessboard.jpg");
// 定义棋盘格的尺寸和角点列表
cv::Size patternSize(11, 8);
std::vector<cv::Point2f> corners;
// 寻找棋盘格角点
bool found = cv::findChessboardCorners(image, patternSize, corners);
if (found) {
// 优化角点坐标精度
cv::cornerSubPix(image, corners, cv::Size(11, 11), cv::Size(-1, -1),
cv::TermCriteria(cv::TermCriteria::EPS + cv::TermCriteria::COUNT, 30, 0.1));
// 定义棋盘格三维坐标
std::vector<cv::Point3f> objectPoints;
float squareSize = 1.0;
for (int i = 0; i < patternSize.height; ++i) {
for (int j = 0; j < patternSize.width; ++j) {
objectPoints.push_back(cv::Point3f(j * squareSize, i * squareSize, 0));
}
}
// 定义相机参数
cv::Mat cameraMatrix = cv::Mat::eye(3, 3, CV_64F);
cv::Mat distCoeffs = cv::Mat::zeros(4, 1, CV_64F);
// 计算 rvec 和 tvec
cv::Mat rvec, tvec;
cv::solvePnP(objectPoints, corners, cameraMatrix, distCoeffs, rvec, tvec);
// 输出结果
std::cout << "rvec: " << rvec << std::endl;
std::cout << "tvec: " << tvec << std::endl;
//计算相机距离被测物的实际距离
float distance = sqrt(tvec.at<double>(0,0) * tvec.at<double>(0,0) + tvec.at<double>(1,0) * tvec.at<double>(1,0) + tvec.at<double>(2,0) * tvec.at<double>(2,0)) / 10;
std::cout << "distance = "<< distance << std::endl;
} else {
std::cout << "未找到棋盘格角点!" << std::endl;
}
return 0;
}三、补充
使用cv::solvePnP测距的方法,任意被测物都可以实现。只需要有世界坐标系的角点(手动测量)和对应点的像素坐标即可。
参考文章:文章来源:https://www.toymoban.com/news/detail-716469.html
本文中使用棋盘格做测距,通过cv::findChessboardCorners寻找所有棋盘格角点后再计算可以大大提高测距精度。文章来源地址https://www.toymoban.com/news/detail-716469.html
到了这里,关于棋盘格测距-单目相机(OpenCV/C++)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!