机器人学工具箱(Robotic Toolbook for Matlab) 是matlab中专门用于机器人仿真的工具箱,在机器人建模、轨迹规划、控制、可视化方面使用非常方便。本次安装环境为Windows 11+MATLAB 2023a,所安装的机器人工具箱的版本为RTB 10.4,后续将有详细的讲解不同的机器人工具箱的版本区别。安装包获取:关注“工业小说家”公众号后台回复“RTB”即可获得工具箱的下载地址。
简介:
本次安装的工具箱是第10个版本,经过超25年的持续发展,已经处于相当成熟的水平。此版本对应于2017年6月出版的《Robotics,Vision & Control》一书的第二版。此MATLAB工具箱具有丰富的功能集合,可用于机器人的研究和仿真:臂型机器人操纵器和移动机器人。对于机器人机械臂,其功能包括运动学、轨迹生成、动力学和控制。对于移动机器人,功能包括路径规划,动力学规划,定位,地图构建和同时定位和映射(SLAM)。

工具箱大量使用类来表示机器人和诸如传感器和地图之类的东西。它包括Simulink®模型来描述手臂或移动机器人状态随时间的演变,用于许多经典的控制策略。工具箱还提供了在数据类型之间进行操作和转换的函数,例如:向量、旋转矩阵、单位四元数、四元数、齐次变换和螺旋变换,这些都是在二维和三维中表示位置和方向所必需的。
代码以一种简单易懂的方式编写,这可能以牺牲计算效率为代价。如果您对计算效率有强烈的感觉,那么您总是可以重写函数以提高效率,使用MATLAB编译器编译m文件,或者创建一个MEX版本。RTB 10很大程度上向后兼容RTB 9。
与旧版的不兼容之处:
-
Vehicle类不再代表阿克曼/自行车车型,Vehicle现是Bicycle和Unicycle的抽象超类,它们分别代表汽车和差动转向车辆。
-
PointMap类被替换成了LandmarkMap类。
-
机器人手臂正运动学现在返回一个SE3对象,而不是一个4*4矩阵。
-
旧版本中:Quaternion类用于表示单位和非单位四元数,这种表示并不规范且令人困惑。现在由UnitQuaternion和Quaternion两个类表示。
-
计算末端执行器坐标系中,手臂机器人雅可比矩阵的方法从jacobn重命名为jacobe。
-
路径规划器,Navigation的子类,寻找路径的方法已被重命名为从path到query。
-
RangeBearingSensor类的雅可比方法被重命名为Hx, Hp, Hw, Gx,Gz。
-
函数se2已替换为SE2类。在某些平台(Mac)上,这是相同的文件。在功能上大致相似,前者返回3×3矩阵,后者返回对象。
-
函数se3已替换为SE3类。在某些平台(Mac)上,这是相同的文件。在功能上大致相似,前者返回4×4矩阵,后者返回对象。

函数和方法名称更改
新版功能:
-
SerialLinkplot3d()渲染逼真的机器人3D模型。Arturo Gil (https://arvc.umh.es/arte)的ARTE包中的STL模型现已包含在RTB中。
-
ETS2和ETS3包提供了一个温和的(非Denavit-Hartenberg)介绍机械臂运动学。
-
新版以. mlbx格式文件进行安装。
-
一套全面的功能来处理在二维环境中旋转和变换,这些功能以后缀2为标识,如:Transl2, rot2, trot2等。
-
矩阵指数可由trexp, trlog, trexp2和trlog2求解。
-
类Twist表示3D或2D的螺旋。分别是李代数se(3)的6个向量表示,或se(2)的3个向量表示。
-
SerialLink.Jointdynamics返回一个由tf对象组成的向量,表示关节执行器的动力学。
-
Lattice类是一个简单的满足动力学约束的路径规划器。
-
PoseGraph解决了图松弛问题,可用于束调整和姿态图SLAM。
-
Plucker类使用Plúcker坐标表示一条线。
-
RST文件夹包含演示MATLAB Robotics System ToolboxTM的一些功能的Live Scripts。
-
文件夹符号包含实时脚本,演示如何使用MATLAB符号数学工具箱tm来推导EKF SLAM(车辆和传感器)中使用的雅可比矩阵,2关节平面臂的逆运动学以及给定旋转矩阵的俯仰-偏转角求解。
-
所有机器人模型,前缀为mdl_,现在存在文件夹models中。
-
新的机器人模型包括Universal Robotics UR3、UR5和UR10;库卡轻型机械臂。
-
一个新的文件夹数据现在包含各种数据文件,如:在RVC2中使用的例子:STL模型,占用网格,Hershey字体,Toro和G2O数据文件。
增强功能:
-
对MATLAB机器视觉工具箱(MVTB)的依赖已被删除。用于路径规划的快速扩展函数现在在MVTB和MATLAB图像处理工具箱(IPT)中搜索,默认为提供的m函数。
-
主要通过所有代码和方法/函数/类文档。
-
正在进行的所有机械手图形的返工和重构工作。一个“应用程序”包括:三角,允许图形实验与欧拉和滚-俯仰-偏航角。
-
整理所有的Simulink模型。红色块现在表示用户可设置的参数,阴影框用于对模型的各个部分进行分组。
-
所有支持DHFactor功能的java代码现在都保存在java文件夹中。其中的Makefile可用于重新编译代码,并且所提供的类文件是均是基于java 1.7所构建而成。

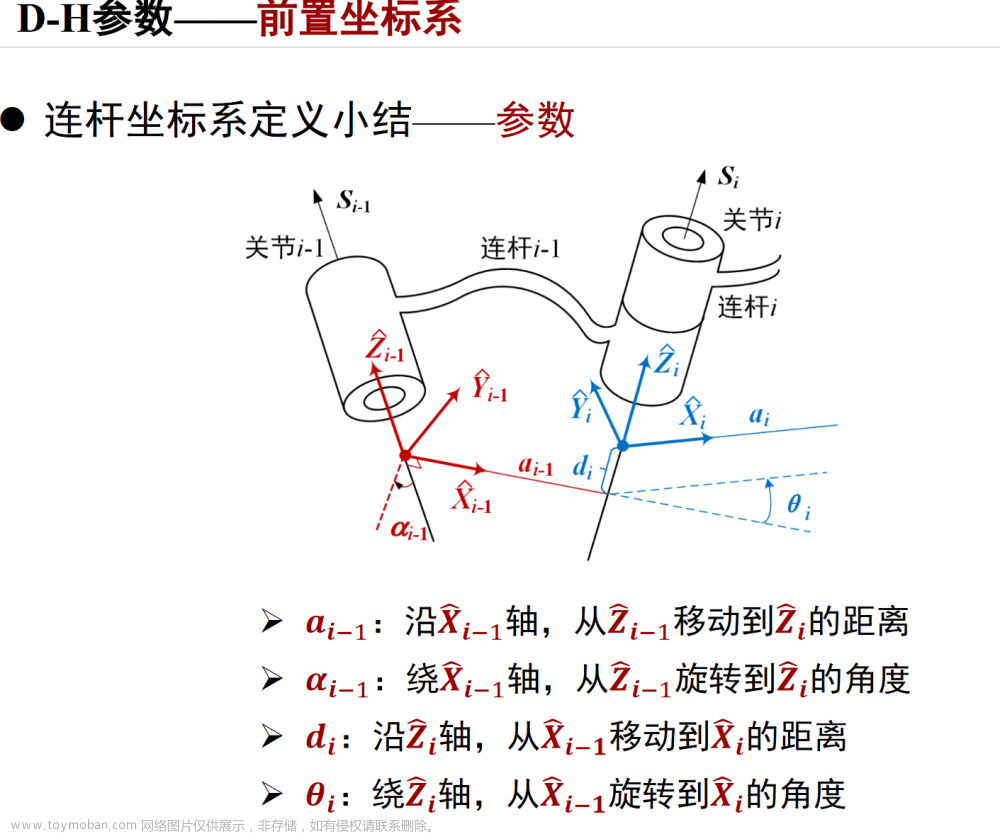
工具箱中姿态和位置的新方法和经典方法

工具箱中不同矩阵之间转换的函数和方法
安装包获取:
关注“工业小说家”公众号后台回复“RTB”即可获得工具箱的下载地址。
安装步骤:
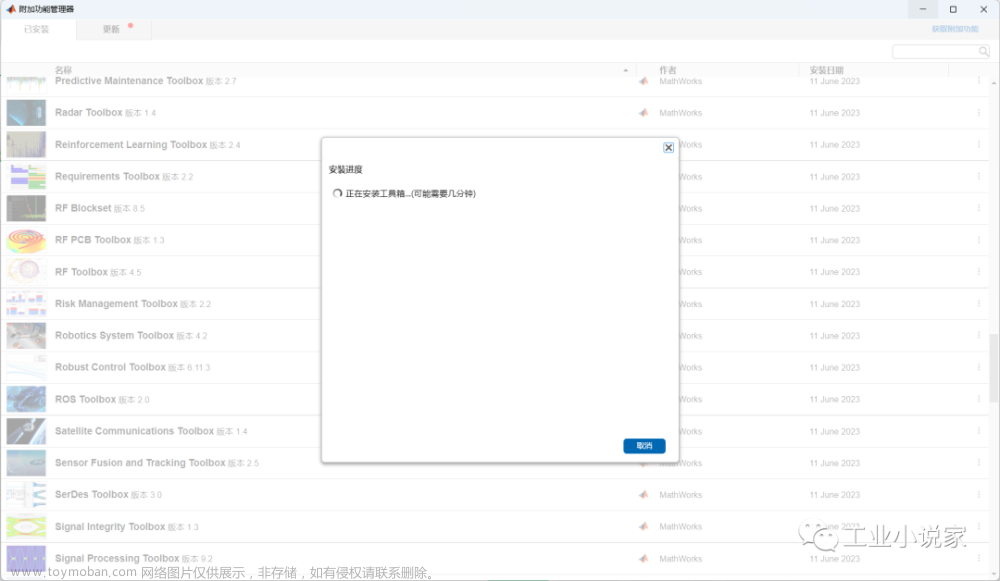
下载完成安装包之后,打开MATLAB 2023a打开安装包所在文件夹下,右击在弹出的对话框中,选择“安装”即可:

等待安装完成:
安装完成后,可在“附加功能管理器”中,看到“Robotics Toolbox for MATLAB”。在MATLAB命令行中输入:
rvccheck
至此,安装完毕!快来尝试一下,文章来源:https://www.toymoban.com/news/detail-744983.html
rtbdemo 文章来源地址https://www.toymoban.com/news/detail-744983.html
文章来源地址https://www.toymoban.com/news/detail-744983.html
到了这里,关于MATLAB机器人工具箱详解1—RTB 10.4版本简介及安装的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!