坐标系学习
三种坐标系介绍
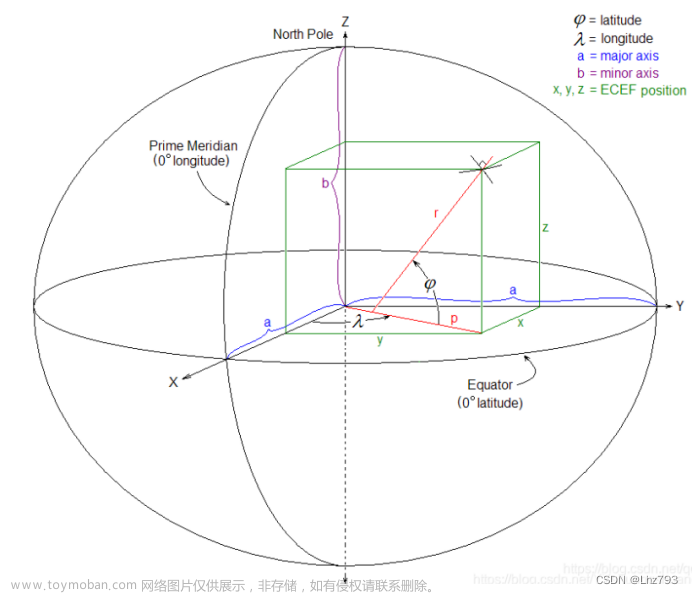
1.地心地固坐标系(ECEF)
地心地固坐标系,也叫ECEF坐标系。其原点为地球的质心。
x轴延伸通过本初子午线(0度经度)和赤道(0度纬度)的交点。
Z轴延伸通过北极(即与地球旋转轴重合)。
y轴完成右手坐标系,穿过赤道和90度经度。
如下图所示
所用的坐标系是右手坐标系(右手定则),将手掌伸直,掌面朝向自己,将中指垂直于掌面,然后将大拇指垂直于中指和食指构成的平面,就构成右手坐标系,此时大拇指,食指,中指分别代表了y轴,z轴,x轴。
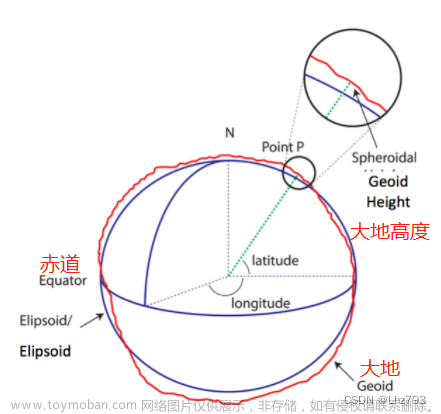
2.经纬高坐标系(84坐标系)
经纬高坐标系(84坐标系)是由经度(longitude),纬度(latitude),高度(altitude)组成的坐标系,也叫LLA坐标系。可以说是最为广泛的一个坐标系,他给出一点的大地纬度,大地经度和大地高度就可以知道这个点在地球上的位置,所以叫做经纬高坐标系。
84坐标系和上面的ECEF坐标系一样,把ECEF放到GPS中就是84坐标系
- 大地纬度是过用户点P的基准椭球面法线与赤道面的夹角。纬度在-90度到90度之间,北半球为正,南半球为负
- 大地经度是过用户点P的子午面与本初子午线之间的夹角。经度值在-180度到180之间
- 大地高度h是过用户点P到基准椭球面的法线距离,基准椭球面里面为负,外面为正
3.东北天坐标系(ENU)
东北天坐标系也叫站心坐标系,以用户所在位置P为坐标原点
坐标轴定义:x轴指向东边,y轴指向北边,z轴指向天顶
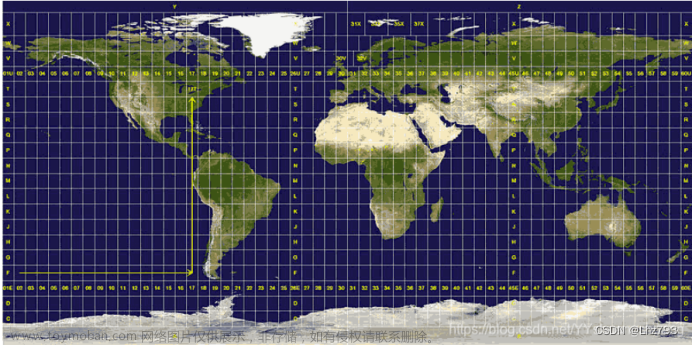
简介:ENU局部坐标系采用三维直角坐标系来描述地球表面,实际应用比较困难,因此一般使用简化后的二维投影坐标系来描述,在众多二维投影坐标系中,统一横轴墨卡托(UTM)坐标系是一种应用较为广泛的一种。UTM坐标系统使用基于网格的方法表示坐标,他将地球分为60个经度区,每个区包含6度的精度范围,每个区内的坐标均基于横轴墨卡托投影,如下图所示:
坐标系之间的转换
1.WGS84--ECEF
需要用到的参数:
地球长半轴半径:a
地球短半轴半径:b
椭球的第一偏心率:e
卯酉圈半径:N
输入:
经度(Lon),纬度(Lat),高度(Ait)
计算:
偏心率:e = sqart(a*a - b*b) / a;
卯酉圈半径:N = a/sqart(1-e*e*sin(Lat)*sin(Lat));
输出X,Y,Z
X = (N+Ait)*cos(Lat)*cos(Lon);
Y = (N+Ait)*cos(Lat)*sin(Lon);
Z =(N*(1-e*e)+Ait)*sin(Lat);
- ECEF--ENU
坐标原点P0(x0, y0, z0),计算点P(x, y, z)以P0为坐标原点的ENU坐标系位置,这里用到的P0的经纬度LLA(lon0, lat0, alt0)。
代码:文章来源地址https://www.toymoban.com/news/detail-789868.html
- // ECEF->ENU
- Re = R0 / sqrt(1 - e * e * sin(p.latitude * torad) * sin(p.latitude * torad));
- double dx_ECEF = (Re + p.height) * cos(p.latitude * torad) * cos(p.longitude * torad) - x0_ECEF;
- double dy_ECEF = (Re + p.height) * cos(p.latitude * torad) * sin(p.longitude * torad) - y0_ECEF;
- double dz_ECEF = (Re * (1 - e * e) + p.height) * sin(p.latitude * torad) - z0_ECEF;
- double x = -sin(p.longitude * torad) * dx_ECEF + cos(p.longitude * torad) * dy_ECEF;
- double y = -sin(p.latitude * torad) * cos(p.longitude * torad) * dx_ECEF - sin(p.latitude * torad) * sin(p.longitude * torad) * dy_ECEF + cos(p.latitude * torad) * dz_ECEF;
- double z = cos(p.latitude * torad) * cos(p.longitude * torad) * dx_ECEF + cos(p.latitude * torad) * sin(p.longitude * torad) * dy_ECEF + sin(p.latitude * torad) * dz_ECEF;
- ENU-ECEF
公式转化

- ECEF-WGS84
ECEF坐标系下点(X,Y,Z)转换为LLA坐标系下的(lon,lat,alt)

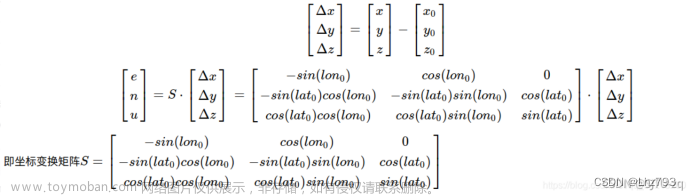
- WGS84-ENU
公式转化
上述可以看到,从LLA坐标系转换到enu坐标系有较多计算量,在考虑地球偏心率e ee很小的前提下,可以做一定的近似公式计算
 文章来源:https://www.toymoban.com/news/detail-789868.html
文章来源:https://www.toymoban.com/news/detail-789868.html
代码:
- //LLA->ENU
- void gps2xy(const &p, const double &ori_longitude, const double &ori_latitude, const double &ori_height)
- {
- double R0 = 6378137.0;
- const double e = 0.0818191908425;
- const double torad = M_PI / 180;
- double Re = R0 / sqrt(1 - e * e * sin(ori_latitude * torad) * sin(ori_latitude * torad));
- double x0_ECEF = (Re + ori_height) * cos(ori_latitude * torad) * cos(ori_longitude * torad);
- double y0_ECEF = (Re + ori_height) * cos(ori_latitude * torad) * sin(ori_longitude * torad);
- double z0_ECEF = (Re * (1 - e * e) + ori_height) * sin(ori_latitude * torad);
- Re = R0 / sqrt(1 - e * e * sin(p.latitude * torad) * sin(p.latitude * torad));
- double dx_ECEF = (Re + p.height) * cos(p.latitude * torad) * cos(p.longitude * torad) - x0_ECEF;
- double dy_ECEF = (Re + p.height) * cos(p.latitude * torad) * sin(p.longitude * torad) - y0_ECEF;
- double dz_ECEF = (Re * (1 - e * e) + p.height) * sin(p.latitude * torad) - z0_ECEF;
- // ECEF to ENU
- double x = -sin(p.longitude * torad) * dx_ECEF + cos(p.longitude * torad) * dy_ECEF;
- double y = -sin(p.latitude * torad) * cos(p.longitude * torad) * dx_ECEF - sin(p.latitude * torad) * sin(p.longitude * torad) * dy_ECEF + cos(p.latitude * torad) * dz_ECEF;
- double z = cos(p.latitude * torad) * cos(p.longitude * torad) * dx_ECEF + cos(p.latitude * torad) * sin(p.longitude * torad) * dy_ECEF + sin(p.latitude * torad) * dz_ECEF;
- }
到了这里,关于三种坐标系学习的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!










