💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
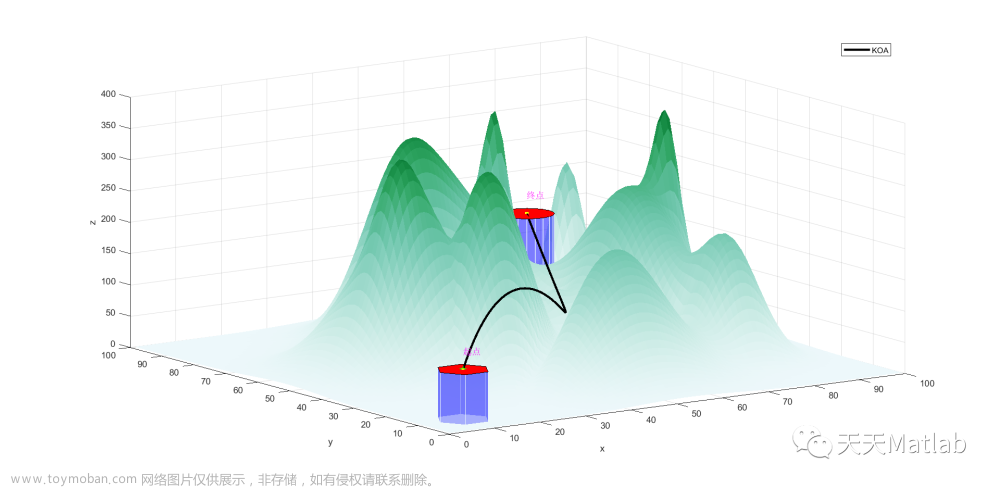
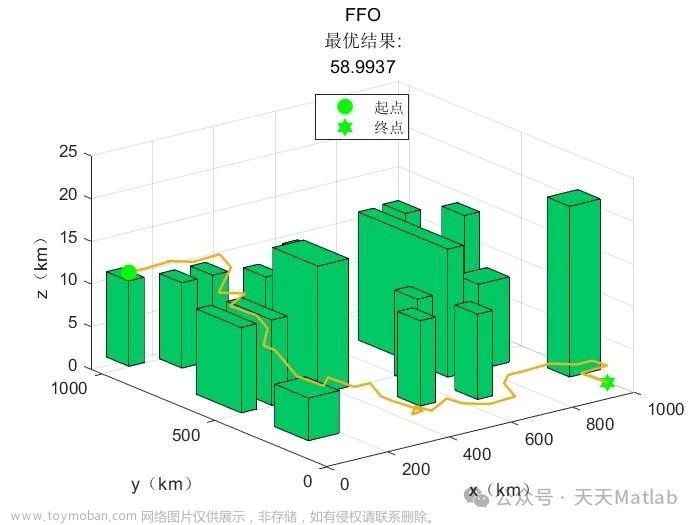
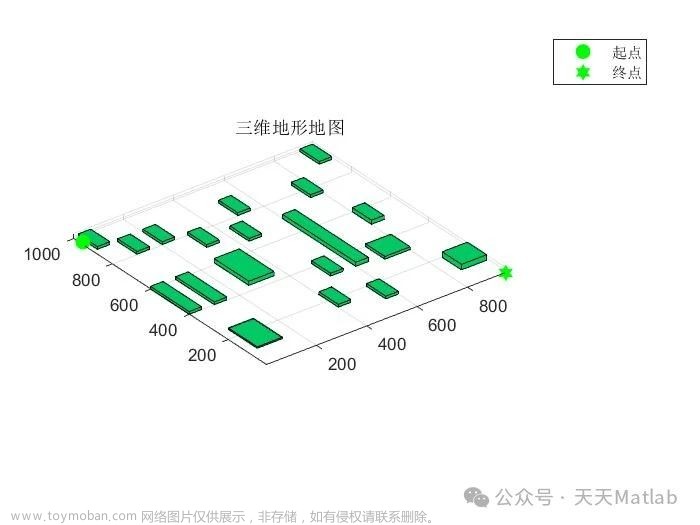
📚2 运行结果
🎉3 文献来源
🌈4 Matlab代码、数据、文章下载
💥1 概述
文献来源:
摘要:
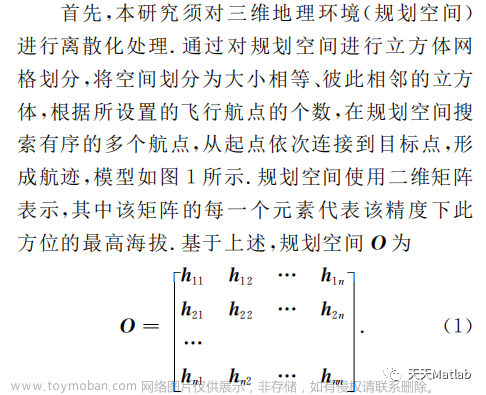
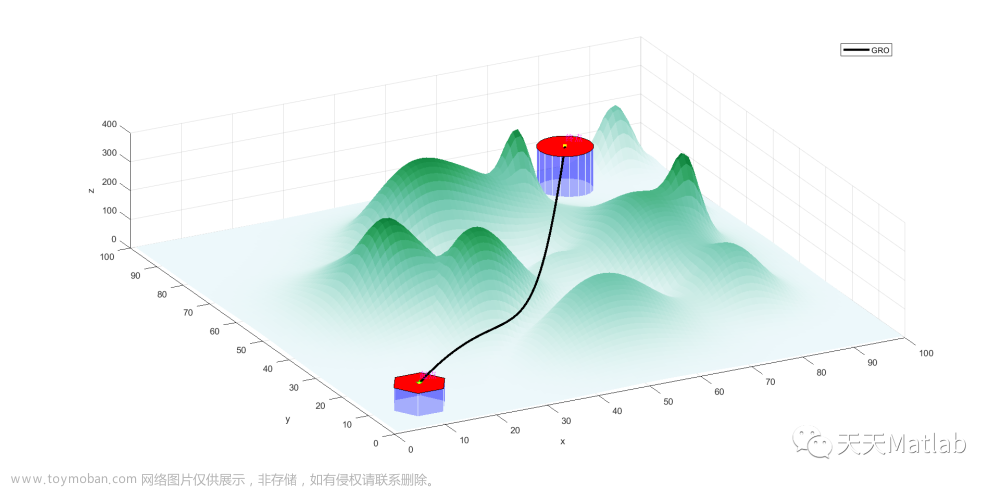
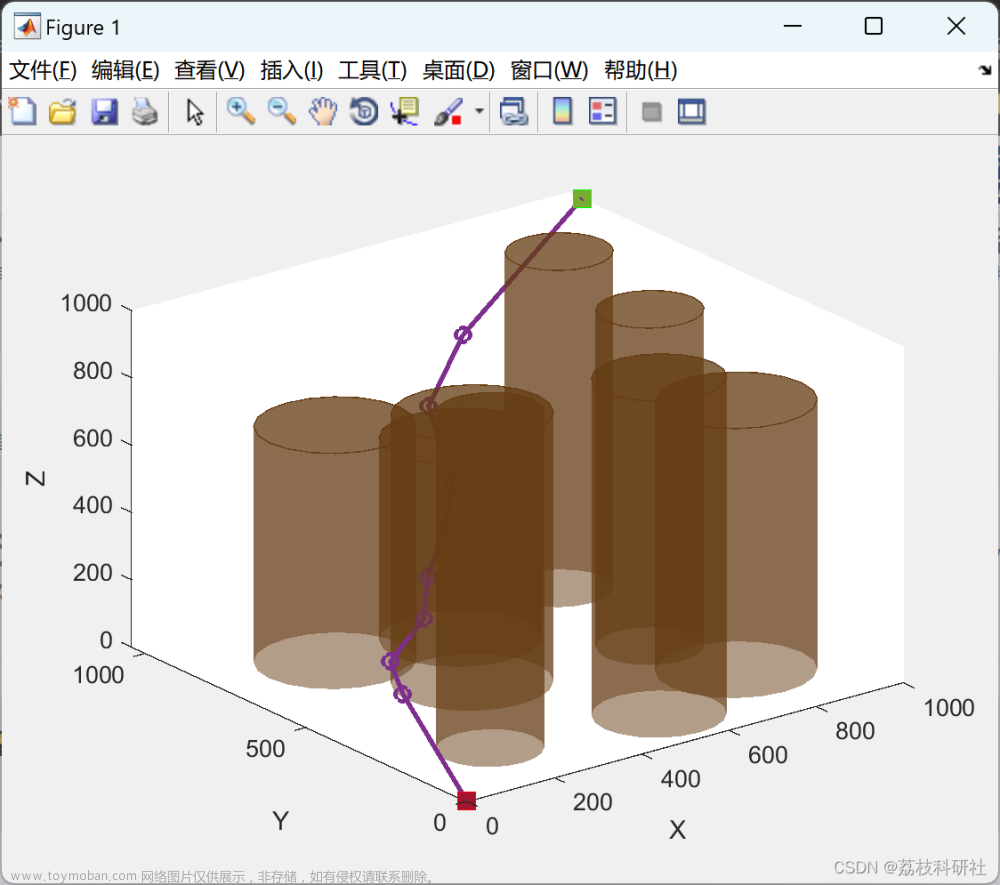
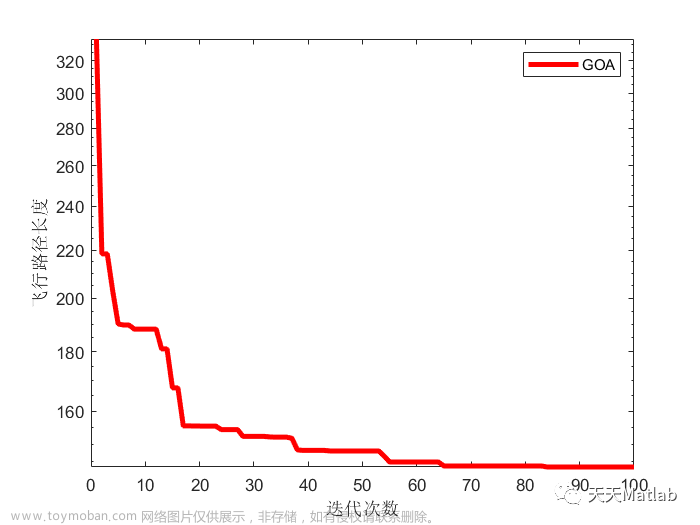
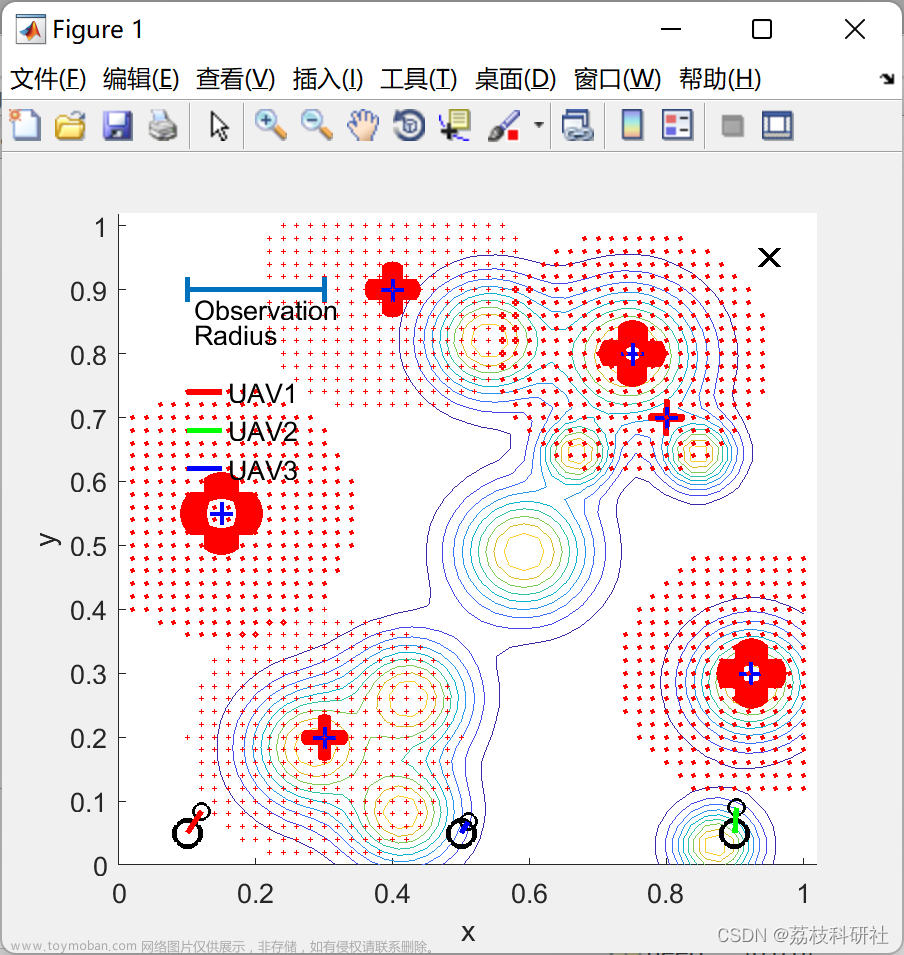
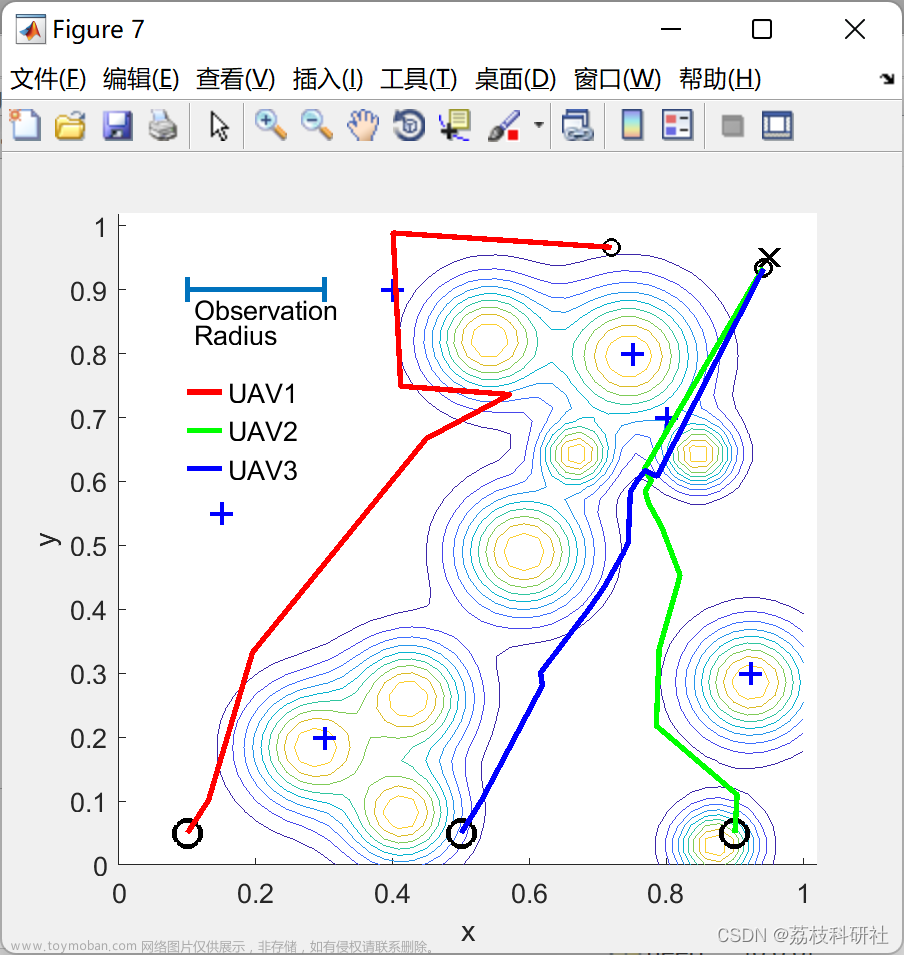
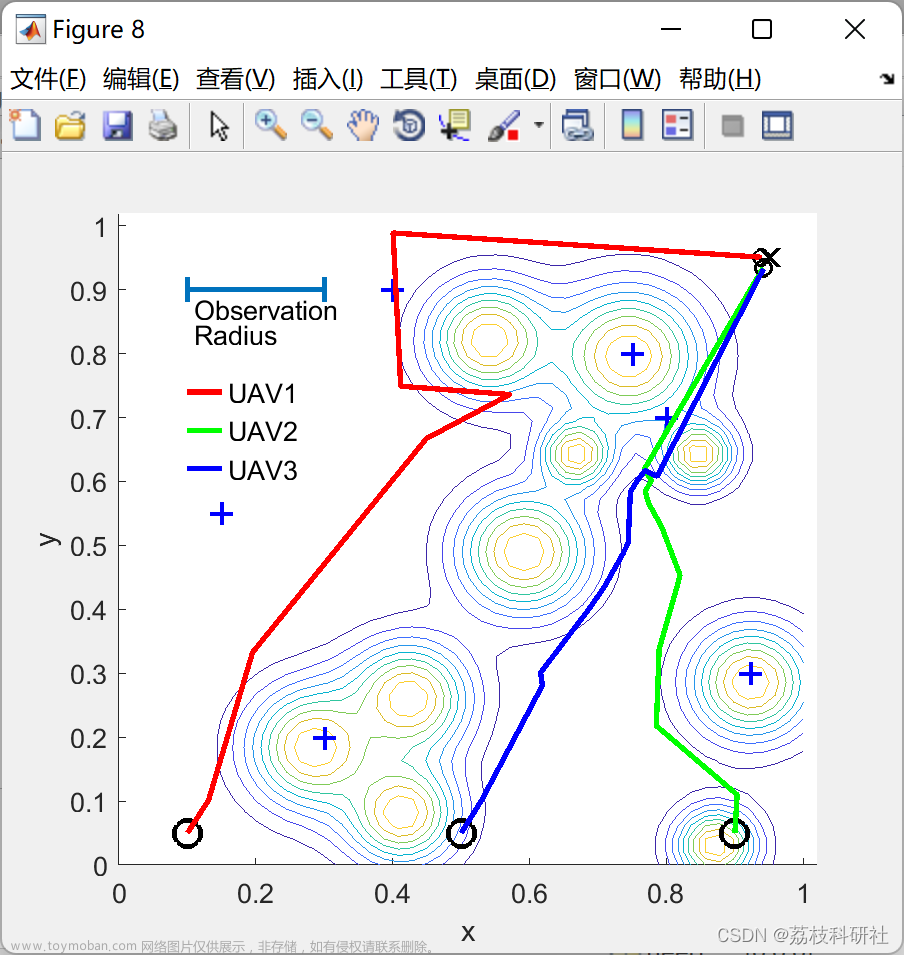
移动边缘计算(MEC)利用网络边缘的计算能力来执行各种物联网应用中的计算密集型任务。同时,无人机(UAV)具有灵活扩大覆盖范围和增强网络性能的巨大潜力。因此,利用无人机为大量物联网设备提供边缘计算服务已成为一种有前景的范式。本文研究了无人机辅助边缘计算网络的路径规划问题,其中一架无人机部署了边缘服务器,用于执行从多个设备卸载的计算任务。我们考虑设备的移动性,采用了高斯马尔可夫随机移动模型。考虑到无人机动态飞行和执行任务消耗的能量,我们制定了一个旨在最大化设备卸载的数据比特量同时最小化无人机能量消耗的路径规划问题。为了处理复杂环境的动态变化,我们应用深度强化学习(DRL)方法,基于双深度Q学习网络(DDQN)开发了一种在线路径规划算法。广泛的仿真结果验证了所提出的基于DRL的路径规划算法在收敛速度和系统奖励方面的有效性。
移动边缘计算(MEC)使得网络边缘的计算能力能够灵活快速地部署创新的应用和服务,为大量物联网设备[1]。有了MEC的部署,设备可以将计算密集型任务转移到附近强大的边缘服务器,以减少延迟和节省能量[1],[2]。与固定的边缘服务器不同,最近的一些工作致力于移动边缘服务器的研究,它可以在恶劣环境中提供更灵活、更经济和更高效的计算服务。最近的一些文献提出使用无人机来改善地面物联网设备的连接性[3]。无人机辅助无线通信在灵活部署、完全可控的移动性和增强网络性能方面具有优势,因此引起了越来越多的研究兴趣。因此,无人机辅助边缘计算网络是一个自然的选择和有前景的范式,在其中如何优化无人机的飞行路径以满足大量设备的通信和计算需求成为一个重要且具有挑战性的问题。
最近,一些现有文献已经研究了无人机辅助移动边缘计算网络中的路径规划问题。在[4]中,针对无人机的延迟和能量消耗约束条件下,联合优化了无人机的轨迹和比特分配。然而,在这些工作中,设备被假定为固定的,并且移动性没有被考虑进去。在实际中,设备可能会随着时间动态变化,因此无人机需要根据移动设备的时变位置相应地调整其轨迹。与此同时,上述工作主要集中在传统的基于优化的路径规划算法上,但随着无人机和设备数量的增加,由于优化变量的激增,该方法效率可能不高[5]。在[6]中,通过使用深度神经网络(DNN)进行函数逼近,已经证明深度强化学习(DRL)在逼近Q值方面是有效的。此后,DRL已经被应用于无线网络中的在线资源分配和调度设计[7] - [9]。具体来说,在[7]中,通过优化卸载决策和计算资源分配,最小化了多用户MEC网络的执行延迟和能量消耗的总系统成本。在[8]中提出了一种在线卸载算法,用于最大化支持无线能量收集的无线供能MEC网络的加权求和计算速率。在[9]中,研究了基于深度强化学习的物联网设备计算卸载策略。然而,据我们所知,目前很少有现有的工作探讨了如何智能设计移动边缘计算网络中无人机的飞行轨迹,以服务于大量设备,尤其是考虑到设备的动态移动性和无人机与设备之间的动态关联。
移动数据处理技术在通信行业的使用正在增加。由于这项技术,具有大计算能力的物联网设备可能会以灵活和及时的方式推出独特的应用程序和服务。当边缘服务器用于卸载计算密集型任务时,延迟降低,能耗降低。近年来,无人机(UAV)以终端用户的多址边缘计算服务器的形式得到了利用。由于其灵活的部署、全面的控制和网络性能,UA V辅助无线通信受到了广泛的研究兴趣UAV辅助的边缘计算网络是有意义的,并且在处理巨大设备的通信和处理需求时是一个有趣的概念。
空中无人机(UAV)长期以来一直被用作移动网络中的网络处理器,但它们现在被用作移动边缘计算(MEC)中的移动服务器。由于它们的灵活性、可移植性、强大的视线通信联系以及低成本、可改变的使用,它们在研究和商业应用中变得更加流行。广泛的民用服务现在可能因其基本特性而得到支持,包括运输和工业监测、农业以及森林火灾和无线服务。本项目研究了基于无人机的移动边缘计算网络,其中无人机(UAV)进行移动终端用户向其提供的计算。为了确保每个TU的服务质量(QoS),UA V基于移动TU的位置动态选择其路线。
详细文章见第4部分。
📚2 运行结果





 部分代码:
部分代码:
function TU_demand_matrix = TU_demand_linear
%% parameters
global N2;
global TU_info;
global SERVICE_RADIS;
global n;
global B;
%% Normalize
maxDemand=max(TU_info(:,3));
minDemand=min(TU_info(:,3));
%% Calculate accumulated TU_info service demand matrix
TU_demand_matrix=zeros(N2,N2); %initial T as N2*N2 0 matrix
for x=1:N2 %for point (x,y) in N2*N2, summrize demand from TU_info with in SERVICE_RADIS, return T
for y=1:N2
sum=0;
for i=1:size(TU_info,1)
if norm([x/N2,y/N2]-TU_info(i,1:2))<= SERVICE_RADIS
sum=sum+(TU_info(i,3)-minDemand)/(maxDemand-minDemand);
end
end
TU_demand_matrix(x,y)=sum;
end
end
end
🎉3 文献来源
部分理论来源于网络,如有侵权请联系删除。文章来源:https://www.toymoban.com/news/detail-843769.html
 文章来源地址https://www.toymoban.com/news/detail-843769.html
文章来源地址https://www.toymoban.com/news/detail-843769.html
🌈4 Matlab代码、数据、文章下载
到了这里,关于【无人机路径规划】基于深度强化学习的多无人机辅助边缘计算网络路径规划(Matlab代码实现)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!