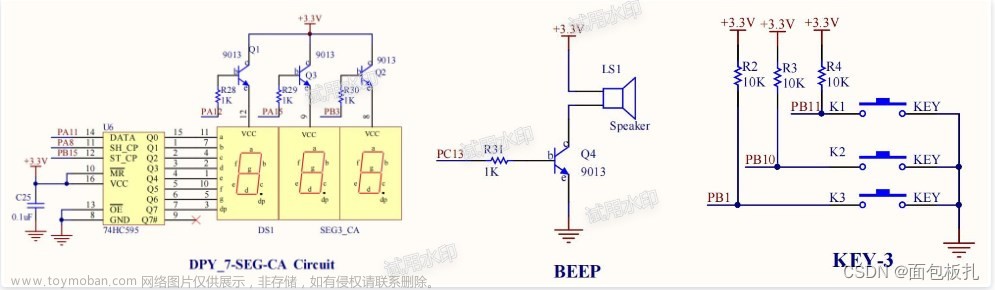
74HC595的最重要的功能就是:串行输入,并行输出。其次,74HC595里面有2个8位寄存器:移位寄存器、存储寄存器。74HC595的数据来源只有一个口,一次只能输入一个位,那么连续输入8次,就可以积攒为一个字节了。
引脚图
14脚:DIN(SER),串行数据输入引脚
13脚:OE, 输出使能控制脚,它是低电才使能输出,所以接GND
12脚:RCK,存储寄存器时钟输入引脚。上升沿时,数据从移位寄存器转存带存储寄存器。
11脚:SCK,移位寄存器时钟引脚,上升沿时,移位寄存器中的bit 数据整体后移,并接受新的bit(从SER输入)。
10脚:SCLR,低电平时,清空移位寄存器中已有的bit数据,一般不用,接高电平即可。
9 脚 :串行数据出口引脚。当移位寄存器中的数据多于8bit时,会把已有的bit“挤出去”,就是从这里出去的。用于595的级联。
Qx:并行输出引脚
使用参数
VCC:2V~6V,5V最好
I Qn:+- 35mA
移位寄存器
74HC595的14脚:DIN,是串行数据输入口。595的数据来源只有这一个口,一次只能输入一个位,那么连续输入8次,就可以积攒为一个字节了。
74HC595的11脚,(shift register clock input) 移位寄存器时钟引脚。上升沿有效。
首先我们要介绍这个引脚的作用,当一个新的位数据要进来时,已经进入的位数据就在移位寄存器时钟脉冲的控制下,整体后移,让出位置。
上升沿:电平从低到高的那个过程。移位寄存器时钟在上升沿这个过程中才起作用。
存储寄存器
595是怎么将移位寄存器的数据转移到存储寄存器。存储寄存器是直接和8个输出引脚相通的,将移位寄存器的数据转移到存储寄存器后,Q0 Q1 Q2 Q3 Q4 Q5 Q6 Q7 就可以接收到我们开始输入的一个字节的数据。所谓存储寄存器,就是数据可以存在这个寄存器中,并不会随着一次输出就消失,只要595不断电,也没有新的数据从移位寄存器中过来,数据就一直不变且有效。新的数据过来后,存储寄存器中的数据就会被覆盖更新。
74HC595的12脚: (storage register clock input ) 存储寄存器时钟
数据从位移寄存器转移到存储寄存器,也是需要时钟脉冲驱动的,这就是12脚的作用。它也是上升沿有效。
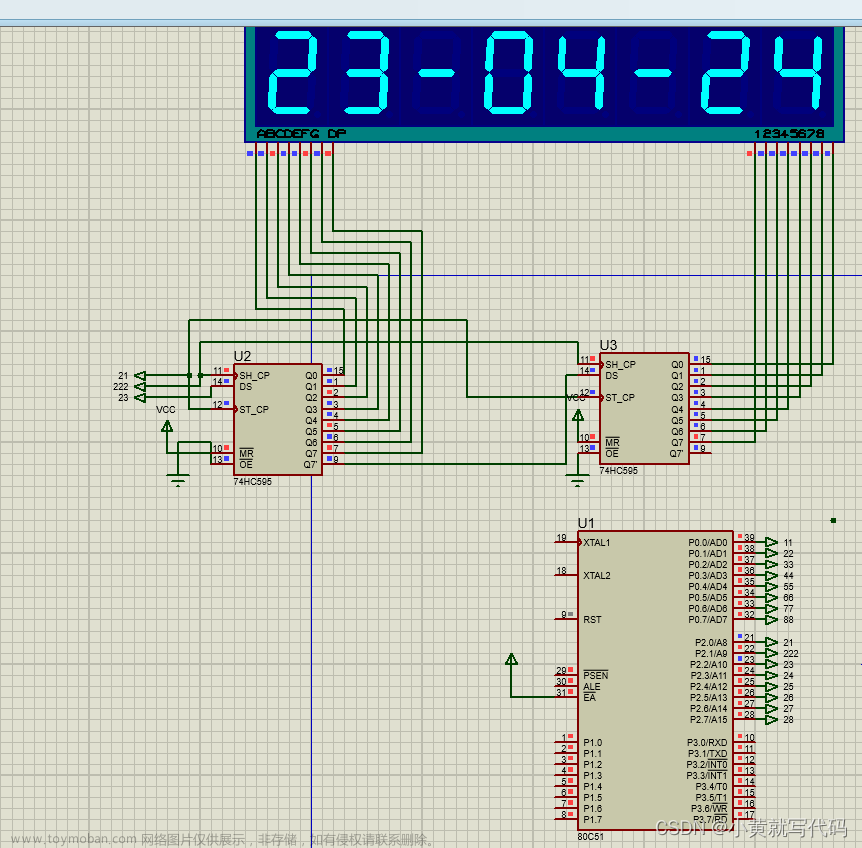
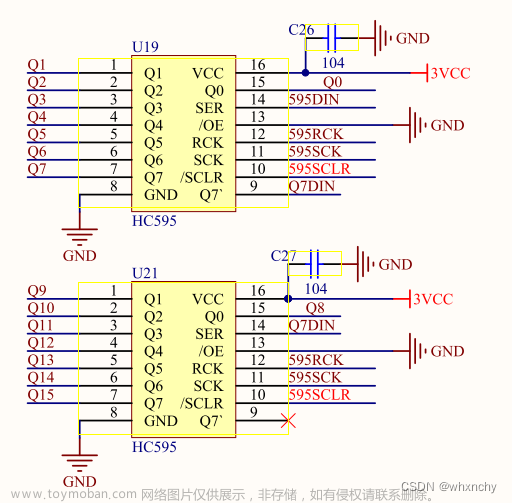
74HC595级联
通过上面的介绍,见识到595的厉害了吧。138译码器通过3个输入口控制8个输出口,而且还只能是特定的8个输出值,而595只用了一个输入口就可以输任意的8位数据,可谓短小精悍。
你觉的1位控制8位输出还不够?
在上面的程序中用到的9脚,没用起作用,如果要让2个595串联起来的话,就需要它了。想一下,我们将移位寄存器的8个位填满后,再往移位寄存器中塞一个会怎么样?也许你想到了。对!移位寄存器的最后一个位数据会被挤出去,从哪里出去?就是从9脚输出的。如果我们把第一个595的9脚连接到第二个的串行数据输入脚SER,那么,就形成了595的级联。这样,如果我们用2个595组合成了一个新的超级595,这个超级595的移位寄存器和存储寄存器的容量都翻倍了,1口控制16口,有木有!你还可以继续级联下去!
74HC595级联实例

#ifndef __HC_595_H__
#define __HC_595_H__
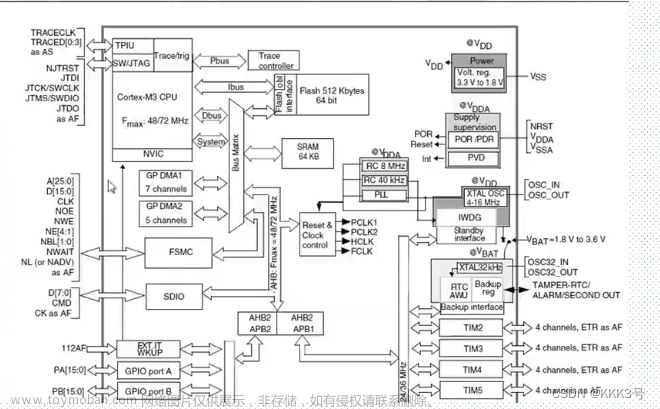
#include "stm32h7xx_hal.h"
// HC595的16位输出端定义位号
// Q0 - 0 .....Q15 -15
#define DIO_HC_A0 (6)
#define DIO_HC_B0 (7)
#define DIO_HC_C0 (0)
#define DIO_HC_A1 (15)
#define DIO_HC_B1 (8)
#define DIO_HC_C1 (1)
#define DIO_HC_A2 (10)
#define DIO_HC_B2 (13)
#define DIO_HC_C2 (14)
/* RLY */
#define DIO_RLY0 (5)
#define DIO_RLY1 (2)
/* S1 S2 */
#define DIO_S1 (11)
#define DIO_S2 (12)
/* CUR */
#define DIO_CUR (9)
/*----------------------------------------- HC595 引脚配置宏 -----------------------------------------------*/
#define HC_595_DIN_ENABLE __HAL_RCC_GPIOE_CLK_ENABLE() // 使能DIN引脚时钟
#define HC_595_DIN_PORT GPIOE // DIN引脚端口
#define HC_595_DIN_PIN GPIO_PIN_1 // DIN引脚
#define HC_595_RCK_ENABLE __HAL_RCC_GPIOE_CLK_ENABLE() // 使能RCK引脚时钟
#define HC_595_RCK_PORT GPIOE // RCK引脚端口
#define HC_595_RCK_PIN GPIO_PIN_3 // RCK引脚
#define HC_595_SCK_ENABLE __HAL_RCC_GPIOE_CLK_ENABLE() // 使能SCK引脚时钟
#define HC_595_SCK_PORT GPIOE // SCK引脚端口
#define HC_595_SCK_PIN GPIO_PIN_2 // SCK引脚
#define HC_595_SCLR_ENABLE __HAL_RCC_GPIOC_CLK_ENABLE() // 使能SCLR引脚时钟
#define HC_595_SCLR_PORT GPIOC // SCLR引脚端口
#define HC_595_SCLR_PIN GPIO_PIN_4 // SCLR引脚
/*-------------------------------------------- IO口操作 ---------------------------------------------------*/
#define HC_595_DIN(a) if (a) \
HAL_GPIO_WritePin(HC_595_DIN_PORT, HC_595_DIN_PIN, GPIO_PIN_SET); \
else \
HAL_GPIO_WritePin(HC_595_DIN_PORT, HC_595_DIN_PIN, GPIO_PIN_RESET)
#define HC_595_RCK(a) if (a) \
HAL_GPIO_WritePin(HC_595_RCK_PORT, HC_595_RCK_PIN, GPIO_PIN_SET); \
else \
HAL_GPIO_WritePin(HC_595_RCK_PORT, HC_595_RCK_PIN, GPIO_PIN_RESET)
#define HC_595_SCK(a) if (a) \
HAL_GPIO_WritePin(HC_595_SCK_PORT, HC_595_SCK_PIN, GPIO_PIN_SET); \
else \
HAL_GPIO_WritePin(HC_595_SCK_PORT, HC_595_SCK_PIN, GPIO_PIN_RESET)
#define HC_595_SCLR(a) if (a) \
HAL_GPIO_WritePin(HC_595_SCLR_PORT, HC_595_SCLR_PIN, GPIO_PIN_SET); \
else \
HAL_GPIO_WritePin(HC_595_SCLR_PORT, HC_595_SCLR_PIN, GPIO_PIN_RESET)
// 函数声明
void HC_595_GPIO_Config(void);
void HC_595_Send_Byte(unsigned short Q15_Q0);
void HC595_Write_QX(unsigned short index,unsigned short sta);
#endif
#include "hc595.h"
static unsigned short Q0_Q15_S = 0;
/*****************************************************************************************
* 函数名: HC595_Delay
* 入口参数: t - 延时时间,以时钟周期数为单位
* 返回值: 无
* 函数功能: 简单延时函数
* 说明: 为了移植的简便性且对延时精度要求不高,所以不需要使用定时器做延时
******************************************************************************************/
void HC595_Delay(unsigned int t)
{
while(t--); // 简单的循环延时,延时时间由入口参数 t 决定
}
/*****************************************************************************************
* 函数名: HC_595_GPIO_Config
* 入口参数: 无
* 返回值: 无
* 函数功能: 初始化移位寄存器的 GPIO 口
* 说明: 配置数据输入引脚(DIN)、存储寄存器时钟引脚(RCK)、移位寄存器时钟引脚(SCK)和清除引脚(SCLR)为推挽输出模式,
* 不带上下拉,速度配置为低速。然后将这些引脚初始化,并设置初始电平状态。
******************************************************************************************/
void HC_595_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
// 初始化IO口时钟
HC_595_DIN_ENABLE;
HC_595_RCK_ENABLE;
HC_595_SCK_ENABLE;
HC_595_SCLR_ENABLE;
// 配置DIN引脚
GPIO_InitStruct.Pin = HC_595_DIN_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出
GPIO_InitStruct.Pull = GPIO_NOPULL; // 不带上下拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; // 低速
HAL_GPIO_Init(HC_595_DIN_PORT, &GPIO_InitStruct);
// 配置RCK引脚
GPIO_InitStruct.Pin = HC_595_RCK_PIN;
HAL_GPIO_Init(HC_595_RCK_PORT, &GPIO_InitStruct);
// 配置SCK引脚
GPIO_InitStruct.Pin = HC_595_SCK_PIN;
HAL_GPIO_Init(HC_595_SCK_PORT, &GPIO_InitStruct);
// 配置SCLR引脚
GPIO_InitStruct.Pin = HC_595_SCLR_PIN;
GPIO_InitStruct.Pull = GPIO_PULLUP; // 上拉
HAL_GPIO_Init(HC_595_SCLR_PORT, &GPIO_InitStruct);
// 初始化引脚状态
HAL_GPIO_WritePin(HC_595_RCK_PORT, HC_595_RCK_PIN, GPIO_PIN_RESET); // RCK输出低电平
HAL_GPIO_WritePin(HC_595_SCK_PORT, HC_595_SCK_PIN, GPIO_PIN_RESET); // SCK输出低电平
HAL_GPIO_WritePin(HC_595_SCLR_PORT, HC_595_SCLR_PIN, GPIO_PIN_SET); // SCLR输出高电平
}
/*****************************************************************************************
* 函数名: HC_595_Send_Byte
* 入口参数: Q15_Q0 - 要发送的16位数据
* 返回值: 无
* 函数功能: 向移位寄存器发送一个16位数据
* 说明: 首先设置移位寄存器的控制引脚为初始状态,然后逐位发送数据,最后将数据加载到移位寄存器中。
******************************************************************************************/
void HC_595_Send_Byte(unsigned short Q15_Q0)
{
// 设置移位寄存器的控制引脚初始状态
HC_595_DIN(0);
HC_595_RCK(0);
HC_595_SCK(0);
HC595_Delay(10);
for( int i = 0 ; i < 16 ; i ++ )
{
// 逐位发送数据
HC_595_SCK(0);
if( Q15_Q0 & 0x8000 )
{
HC_595_DIN(1);
}
else
{
HC_595_DIN(0);
}
HC595_Delay(1);
HC_595_SCK(1); // 移位寄存器输入一个字节数据
HC595_Delay(1);
Q15_Q0 <<= 1;
}
// 将数据加载到移位寄存器中
HC_595_RCK(1); // 存储寄存器输入,Q1-Q15输出
HC595_Delay(1);
HC_595_RCK(0);
HC_595_SCK(0);
}
/* w_gpio_sem */
static unsigned char w_gpio_sem = 0;
/*****************************************************************************************
* 函数名: HC595_Write_QX
* 入口参数: index - 输出引脚的编号,sta - 输出状态,1为高电平,0为低电平
* 返回值: 无
* 函数功能: 控制移位寄存器的输出引脚状态
* 说明: 根据输入的输出引脚编号和状态,更新移位寄存器中对应引脚的状态,并发送更新后的状态到移位寄存器。
******************************************************************************************/
void HC595_Write_QX(unsigned short index,unsigned short sta)
{
// 检查是否有其他操作在进行
if( w_gpio_sem )
{
return;
}
// 锁定
w_gpio_sem = 1;
// 检查输出引脚编号是否合法
if( index > 16 )
{
return;
}
// 根据状态设置输出引脚状态
if( sta )
{
Q0_Q15_S |= ( 1 << index );
}
else
{
Q0_Q15_S &=~ ( 1 << index );
}
// 更新移位寄存器中的输出状态
HC_595_Send_Byte(Q0_Q15_S);
// 解锁
w_gpio_sem = 0;
}
-
HC_595_GPIO_Config: 初始化HC595芯片的GPIO口,包括数据输入引脚(DIN)、存储寄存器时钟引脚(RCK)、移位寄存器时钟引脚(SCK)和清除引脚(SCLR)。配置这些引脚为推挽输出模式,并设置初始电平状态。 -
HC_595_Send_Byte: 向HC595芯片发送一个16位数据,通过移位寄存器将数据加载到芯片中,控制输出引脚的状态。 -
HC595_Write_QX: 根据输入的输出引脚编号和状态,更新移位寄存器中对应引脚的状态,并通过HC_595_Send_Byte函数发送更新后的状态到移位寄存器。 -
HC595_Delay: 简单的延时函数,用于产生一定时间的延时,以时钟周期数为单位。
注意
HC595的DIN输入端输出的数据会从Q0开始,继续输入,之前的Q0数据会移位至Q1,一直循环。
完整的输入一个字节数据,假设输入的是unsigned char Q_byte =(高)1011 1111(低) 。因为HC_595_Send_Byte程序中是从高位开始发送的,最高位的数据再经过完整的一个字节循环后就被push到了Q7(很像队列)
Q0 = 1;Q1=1;Q2=1;Q3=1;Q4=1;Q5=1;Q6=0;Q7=1;
我们要改变Q0-Q7中的某个位做法:
假设改变Q3位,则把 (高)1011 0111(低)重新写入HC595中。
Q_byte = Q_byte & ~ (1<<3) = 1011 1111 & 1111 0111 = 1011 0111;文章来源:https://www.toymoban.com/news/detail-843989.html
这是一个595的情况,级联情况下同理,代码,处理的就是级联情况。所以应用HC595_Write_QX函数就可以操作Q0-Q15任意一个输出位的电平了。文章来源地址https://www.toymoban.com/news/detail-843989.html
到了这里,关于HC595级联原理及实例 - STM32的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!