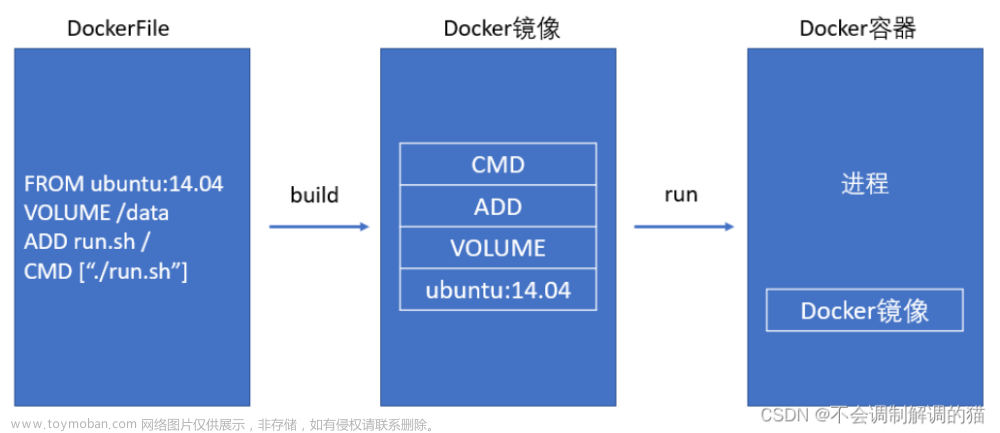
FROM 指定基础镜像
基础镜像是构建镜像的起点,定制镜像都需要以一个镜像为基础,然后对其进行修改,From就是用来指定基础镜像的,因此Dockerfile中From是必备的指令,而且必须是第一条。
Docker中存在一个特殊镜像名为 scratch 这个镜像并不存在,仅表示一个空白的镜像,下一条指令会作为镜像的第一层存在。
FROM 指令还可以用于实现多段构建,这在需要进行多个步骤来构建镜像时非常有用。例如,在第一个阶段构建代码,第二个阶段将构建的代码复制到最终镜像中。多阶段构建可以减小最终镜像的大小,因为只有构建时需要的文件和依赖项才会被包含在镜像中,而构建过程中生成的临时文件则会被丢弃。
示例:
创建docker文件夹,并在目录下创建Dockerfile文件
mkdir docker
cd docker
vim Dockerfile
在Dockerfile中写入:
# 第一个阶段:构建二进制文件
FROM golang:latest AS builder
# 指定工作目录
WORKDIR /app
# 将上下文路径内容复制到工作目录
COPY . .
# 编译二进制文件
RUN go env -w GO111MODULE=off \
&& go build hello.go
# 第二个阶段:构建最终镜像
FROM ubuntu:18.04
WORKDIR /root/
# 从第一个阶段复制二进制文件到最终镜像中
COPY --from=builder /app/hello .
# 设置容器启动命令
CMD ["./hello"]
再创建一个go文件
vim hello.go
写入:
package main
import "fmt"
func main() {
fmt.Println("Hello World")
}
执行:
docker build -t hello-world:v1 .
docker run --rm hello-world:v1
可以看到输出Hello World 。
用docker history 指令查看创建的镜像,只看到最后一个FROM后的指令:
docker history hello-world:v1

RUN 执行命令
RUN指令用于在镜像构建过程中执行命令,有两种语法格式:
shell 格式:
RUN <command>
示例:
RUN apt-get update && apt-get install -y \
package1 \
package2 \
package3
exec 格式:
RUN ["executable", "param1", "param2"...]
示例:
RUN ["apt-get", "update"]
RUN ["apt-get", "install", "-y", "package1", "package2", "package3"]
缓存机制:当使用Dockerfile构建镜像时,Docker会检查每一步的缓存。如果之前已经构建过相同的镜像且镜像层没有发生变化,Docker会直接复用之前的镜像层,避免重复的构建工作,加快镜像的构建速度。
COPY 复制文件
格式如下:
COPY <源路径>... <目标路径> // 格式1
COPY ["源路径",..."目标路径"] //格式2
源路径以上下文路径为基础。
…指可以有多个源路径,但是目标路径只能有一个。
如果源路径为文件夹,复制的时候不是直接复制该文件夹,而是将文件夹中的内容复制到目标路径。
源路径可以是通配符,但是需要满足GO的filepath.Match规则
示例:
COPY hom* /mydir/
COPY hom?.txt /mydir/
默认情况下,COPY 指令会保留文件或目录的原始权限和所有者。如果需要更改文件的权限或所有者,可以使用 --chown选项。
COPY [--chown=<user>:<group>] <源路径>... <目标路径>
COPY [--chown=<user>:<group>] ["<源路径>",... "<目标路径>"]
在多段构建时可以使用–from选项来指定从某个阶段复制文件。
COPY [--from=builderName] <源路径>... <目标路径>
COPY [--from=builderName] ["<源路径>",... "<目标路径>"]
ADD 高级文件复制
ADD指令与 COPY指令类似,都是用于将文件或目录从主机(构建上下文)复制到 Docker 镜像中的指定位置。但 ADD 指令在功能上更加强大,它除了复制文件外,还支持自动解压缩压缩包、支持 URL 地址。
ADD [--chown=<user>:<group>] <源路径>... <目标路径>
如果源路径是一个压缩文件(.tar, .tar.gz, .tgz, .tar.bz2, .tbz2, .tar.xz, .txz, .zip)会被自动解压缩到目标路径
如果源路径是一个URL,会被下载到目标路径。
注:ADD 会使镜像缓存失效,可能会导致镜像构建缓慢。在复制文件时,应当尽可能使用COPY,仅在需要自动解压缩的场景使用ADD。
CMD 容器启动命令
格式与RUN相近:
CMD <command> // shell格式
CMD ["executable", "param1", "param2"...] // exec格式
CMD 命令用于指定容器启动时执行的默认命令。
如果在 Dockerfile 中有多个 CMD 指令,则只有最后一个会生效。
通常情况下,推荐使用 Exec 格式,因为它更加明确和可靠。Shell 形式可能会受到 shell 环境的影响,而且可能会导致一些不可预测的问题。
容器中的应用都应该以前台执行,容器没有后台的概念,如果后台执行可能会导致容器退出。
docker run 提供的参数列表会覆盖掉CMD的参数列表,如:
在Dockerfile中写入:
FROM ubuntu:18.04
CMD ["echo","Hello"]
执行:
docker build -t hello:v1 .
docker run --rm hello:v1 "echo" "hello world"
可以看到容器输出 hello world 而不是 Hello
ENTRYPOINT 入口点
格式与CMD相近:
ENTRYPOINT <command> // shell格式
ENTRYPOINT ["executable", "param1", "param2"...] // exec格式
ENTRYPOINT指令和CMD指令都是指定容器启动时的指令和参数,但docker run 提供的参数列表不会覆盖掉ENTRYPOINT的参数列表,而是会添加到参数列表后,如:
在Dockerfile中写入:
FROM ubuntu:18.04
ENTRYPOINT ["echo","Hello"]
执行:
docker build -t hello:v2 .
docker run --rm hello:v2 "World"
可以看到容器输出 Hello World
当CMD与ENTRYPOIN一起使用时,CMD的参数会传给ENTRYPOINT,如:
在Dockerfile中写入:
FROM ubuntu:18.04
ENTRYPOINT ["echo","Hello"]
CMD ["World"]
执行:
docker build -t hello:v3 .
docker run --rm hello:v3
可以看到容器输出Hello World。
–rm选项删除了容器,镜像还在,可以使用下面指令删除掉刚刚创建的几个镜像:
docker image rm $(docker image ls hello -q)
ENV 设置环境变量
ENV 指令用于在 Dockerfile 中设置环境变量,类似给一个值设置别名。ENV设置的环境变量可以在容器运行时被应用程序使用。ENV 指令的基本语法如下:
ENV <key> <value> // 格式1
ENV <key1>=<value1> <key2>=<value2>... // 格式2
示例:
在Dockerfile写入:
FROM ubuntu:18.04
ENV HW Hello_World
RUN ["echo","$HW"]
执行:
docker build -t hw:v1 .
可以在构建信息中看到,RUN指令的参数列表实际为[“echo”,“Hello World”]
=> [2/2] RUN ["echo","Hello_World"]
下列指令可以支持环境变量展开: ADD、COPY、ENV、EXPOSE、FROM、LABEL、USER、WORKDIR、VOLUME、STOPSIGNAL、ONBUILD、RUN。
不支持的有:CMD、ENTRYPOINT
注:FROM虽然支持展开,但ENV不能在第一行,否则会输出错误:
ERROR: failed to solve: no build stage in current context
ARG 构建参数
格式:
ARG <参数名>[=<默认值>]
ARG 与 ENV 的效果一样,都是设置环境变量,区别是ARG在容器运行时无效,仅在构建过程中生效。
ARG用于构建过程中的参数传递,使用这个指令并不创建新的层,因此可以在第一个FROM之前使用,而 ENV 是用于设置镜像和容器的运行环境,会创建新的层,因此必须在 FROM之后使用。
生效范围:若在第一个FROM之前指定,则仅在每个FROM指令中生效。在多段构建中,FROM后指定的ARG只在当前阶段生效。
注:ARG的参数可以在构建命令 docker build 中用 --build-arg <参数名>=<值> 来覆盖。
灵活的使用 ARG 指令,能够在不修改 Dockerfile 的情况下,构建出不同的镜像。
VOLUME 定义匿名卷
格式:
VOLUME <路径>
VOLUME ["<路径1>", "<路径2>"...]
容器运行时应该尽量保持容器存储层不发生写操作,对于动态的数据应当保存在VOLUME中。在 Docker 中,Volume(卷)是用于持久化存储数据的机制,允许容器与宿主机之间共享数据。Volumes 可以在容器的生命周期内持续存在,即使容器被删除,数据也可以保留在宿主机上。
如:
VOLUME /data
在容器中任何对/data文件夹的写入都不会记录在容器存储层,而是保存在宿主机的/data文件夹中,而容器从宿主机中读取数据。
EXPOSE 声明端口
格式:
EXPOSE <端口1> [<端口2>...]
EXPOSE 仅用于说明该容器运行时的有哪些提供服务的端口,并无实际用处,类似于注释提高可读性。该指令与ARG指令一样并不会新建层。
若需要暴露容器端口并映射到宿主机端口需要在docker run时使用-p <宿主端口>:<容器端口>选项:
如:
docker run --name web -d -p 8000:80 nginx
WORKDIR 指定工作目录
WORKDIR 指令用于指定工作目录,以后各层的当前目录就被改为指定的目录
如该目录不存在,WORKDIR 会新建目录。
可以使用绝对路径或相对路径来指定工作目录。如果使用相对路径,则会相对于上一个 WORKDIR 指令设置的目录。
如:
WORKDIR /hello
WORKDIR world
RUN pwd
RUN pwd 的工作目录为 /hello/world。
USER 指定当前用户
格式:
USER <用户名>[:<用户组>]
USER 指令和 WORKDIR 相似,都是改变环境状态并影响以后的层。WORKDIR 是改变工作目录,USER 则是改变之后层的执行 RUN, CMD以及 ENTRYPOINT这类命令的身份。
注:USER 只是切换到指定用户而已,这个用户必须是事先建立好的,否则无法切换。
HEALTHCHECK 健康检查
格式:
HEALTHCHECK [选项] CMD <命令> // 设置检查容器健康状况的命令
HEALTHCHECK NONE // 屏蔽基础镜像的健康检查指令
Docker 的 HEALTHCHECK 是用于在容器运行时检查容器内服务或应用程序的状态的机制。通过 HEALTHCHECK,可以告诉 Docker 应该如何进行判断容器的状态是否正常。没有HEALTHCHECK指令时,Docker只会在主进程退出时认为容器状态不正常,而进程陷入死锁或者死循环等不正常状态时Docker不会理会。
选项:
--interval=<间隔>:两次健康检查的间隔,默认为 30 秒;--timeout=<时长>:健康检查命令运行超时时间,如果超过这个时间,本次健康检查就被视为失败,默认 30 秒;--retries=<次数>:当连续失败指定次数后,则将容器状态视为unhealthy,默认 3 次。
HEALTHCHECK指令只有最后一条生效,后面的会覆盖掉前面的。
CMD格式与CMD指令一致,需要有返回值,命令的返回值决定这次HEALTHCHECK的结果:0:成功;1:失败;2:保留,不要使用这个值。
如:
HEALTHCHECK CMD <command> || exit <code>
|| : Shell 中的逻辑 OR 运算符,表示如果前面的命令失败(返回非零退出码),则执行接下来的命令。
exit <code> :用于退出当前脚本,并且返回一个退出码。
健康检查命令的输出(包括 stdout 以及 stderr)都会被存储于健康状态里,可以用 docker inspect 来查看:
docker inspect --format '{{json .State.Health}}' <container_name>
可以在命令末尾添加json工具命令进行格式化输出,如:
docker inspect --format '{{json .State.Health}}' <container_name> | python -m json.tool
ONBUILD 构建触发器
ONBUILD 用于定义镜像构建触发器,当一个镜像包含 ONBUILD 指令时,这个指令将不会立即执行,而是在该镜像作为另一个镜像的基础镜像(父镜像)进行构建时触发。当需要构建多个镜像,但各个镜像中有重复部分的场景,就可以使用ONBUILD构建一个基础镜像,然后其他镜像以这个基础镜像进行构建。这样的好处在于减少重复代码的编写,并且如果基础镜像出现错误或者纰漏时,只需修改基础镜像并根据Dockerfile重新构建其他镜像即可,这无疑大大提高了镜像的可维护性与Dockerfile的编写效率。
示例:
在docker文件夹外,新建文件夹baseDocker并创建一个Dockerfile:
mkdir baseDocker
cd baseDocker
vim Dockerfile
输入:
FROM golang:latest
WORKDIR /app
ONBUILD COPY . .
ONBUILD RUN go env -w GO111MODULE=off \
&& go build hello.go
执行:
docker build -t base:v1 .
回到docker文件夹在Dockerfile中输入:
# ONBUILD构建的基础镜像
FROM base:v1 AS builder
FROM ubuntu:18.04
WORKDIR /root/
COPY --from=builder /app/hello .
CMD ["./hello"]
执行:
docker build -t hello-world:v1 .
docker run --rm hello-world:v1
可以看到容器输出Hello World。
ONBUILD的指令会延迟到作为父镜像构建新镜像时执行,这样可以获取到足够的信息。比如上下文路径,如果不使用ONBUILD ,构建基础镜像时的上下文路径已经定死了,后续镜像只能在基础镜像的上下文路径中构建,这显然是不可行的。
LABEL 添加元数据
格式:
LABEL <key>=<value> <key>=<value> <key>=<value> ...
LABEL 指令用于向 Docker 镜像添加元数据,通常用来提供关于镜像的描述信息、版本信息、维护者信息等。这些标签信息可以帮助用户更好地理解和使用镜像,也可以在构建镜像时提供一些有用的信息。
注:LABEL也会新建一层,所以尽可能使用一个LABEL避免镜像臃肿。
如果在第一个FROM前使用LABEL会输出错误:
ERROR: failed to solve: no build stage in current context
在Dockerfile中输入:
FROM ubuntu:18.04
LABEL authors="bulo"
ENTRYPOINT ["echo","Hello"]
执行:
docker build -t hello:v1 .
docker history hello:v1
可以看到LABEL指令创建的层

镜像被添加的元数据也可以用 docker inspect 来查看:
docker inspect --format='{{json .Config.Labels}}' <image_name>
执行:
docker inspect --format='{{json .Config.Labels}}' hello:v1

SHELL 指定解释器
格式:
SHELL ["executable", "parameters"]
SHELL 指令用于设置 Dockerfile 中后续指令的默认解释器,比如在执行 RUN、CMD、ENTRYPOINT 等命令时使用的 Shell 解释器。默认情况下,Docker 使用 /bin/sh -c 作为默认的 Shell 解释器。
如使用bash作为默认解释器:文章来源:https://www.toymoban.com/news/detail-853282.html
SHELL ["/bin/bash", "-c"]
PS:阿巴阿巴阿巴…文章来源地址https://www.toymoban.com/news/detail-853282.html
到了这里,关于Docker学习笔记(三)Dockerfile指令详解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!